Interruptores ópticos de proximidad
Los interruptores de proximidad ópticos (sensores) se usan ampliamente hoy en día en muchas industrias donde el equipo se usa para posicionar, contar y simplemente detectar varios objetos. El uso de la codificación en los circuitos de sensores permite evitar la influencia externa de fuentes de luz sobre ellos y, por lo tanto, protege contra falsas alarmas. Los sensores en carcasas térmicas están diseñados para funcionar a bajas temperaturas.
Estos dispositivos son circuitos electrónicos que responden a un cambio en el flujo de luz que incide sobre el receptor, por lo que se registra la presencia o ausencia de un objeto en una determinada zona del espacio. La codificación de la luz emitida por la fuente (selección espacial y modulación) mejora la eficiencia y, como se mencionó anteriormente, anula los efectos de la interferencia.
Estructuralmente, el sistema sensor incluye dos bloques funcionales principales: la fuente de radiación y su receptor. Estos pueden ser dos carcasas separadas, o una carcasa para ambos bloques, según el principio de funcionamiento de un sensor en particular (interruptor).
Una fuente o emisor consta de las siguientes partes: un generador, un emisor, un indicador, un sistema óptico y una carcasa, dentro de la cual hay un circuito protegido por una junta, y afuera, todo lo necesario para la fijación. La tarea del generador es generar una secuencia de pulsos de señal para el transmisor.
El emisor en sí es un LED. El patrón de emisión del LED está formado por el sistema óptico. El indicador muestra la presencia o ausencia de alimentación al sensor. La carcasa protege contra influencias mecánicas externas y sirve para una instalación conveniente en el lugar de aplicación del sensor.
El receptor, a su vez, también tiene un sistema óptico que forma el patrón direccional del receptor y proporciona selección. El fotodetector que sirve fototransistorque detecta la radiación y la convierte en una señal eléctrica; un circuito amplificador con un elemento de umbral para proporcionar una pendiente confiable con histéresis; un interruptor electrónico para cambiar la carga y un regulador para ajustar la sensibilidad del receptor para que los objetos se registren claramente contra el fondo circundante.
Aquí hay dos indicadores: el primero muestra el estado de la salida, el segundo muestra la calidad de la señal recibida y le permite determinar la reserva funcional para el objeto monitoreado.
En este caso, la reserva funcional caracteriza la relación del flujo luminoso recibido por el receptor del emisor a su valor mínimo, que ya provoca la operación. La reserva funcional compensa la atenuación de la señal debida a la contaminación de la óptica oa la perturbación de las partículas de aerosol en el entorno.
Por ejemplo:
- el indicador se ilumina en rojo, lo que significa que el objeto rastreado está presente en la zona de activación;
- luz amarilla — se reduce la intensidad del flujo de luz recibido;
- verde: la intensidad del flujo de luz recibido es mínima;
- apagado: el objeto no está en el área de trabajo del sensor.
Según el principio de funcionamiento, los sensores ópticos son de tres tipos:
Barrera (Tipo T)
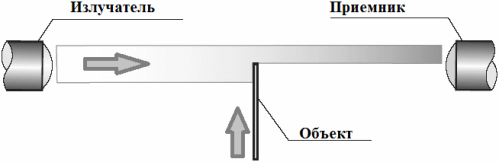
Los interruptores ópticos de tipo barrera funcionan con un haz directo y contienen dos partes separadas, un transmisor y un receptor, que deben ubicarse coaxialmente uno frente al otro para que el flujo de radiación emitido por el emisor (transmisor) se dirija y golpee con precisión el receptor.
Cuando el rayo es interrumpido por un objeto, el interruptor se activa. Los sensores de este tipo pueden funcionar a una distancia de decenas de metros entre el transmisor y el receptor, además, tienen un buen aislamiento acústico, no temen al polvo, ni una gota de líquido, etc.
Pero también hay desventajas:
- a veces es necesario tender cables de alimentación por separado a cada una de las dos partes a largas distancias;
- los objetos muy reflectantes pueden provocar falsas alarmas;
- los objetos transparentes pueden no debilitar lo suficiente el haz, esto debe tenerse en cuenta.
El regulador de la sensibilidad se usa para la eliminación aceptable de estas faltas. Y, por supuesto, el tamaño mínimo del objeto detectado no debe ser inferior al diámetro del haz.
Difuso (Tipo D)
Los sensores difusos utilizan un haz reflejado por un objeto, un reflejo especular. El receptor y el transmisor están en una carcasa. El emisor dirige el flujo hacia el objeto, el haz se refleja desde su superficie en diferentes direcciones, dependiendo de las características ópticas del objeto. Parte del flujo regresa donde es recogido por el receptor y se acciona el interruptor.
Aquí es importante considerar que las falsas alarmas pueden ser provocadas por objetos reflectantes ubicados detrás del área de trabajo de la instalación, detrás del objeto controlado. Para eliminar tales interferencias, se utilizan interruptores con función de supresión de fondo.
Para estandarizar la distancia a la que se activará el sensor difuso, tome una hoja de papel blanca (de 10 x 10 cm para distancias de hasta 40 cm o de 20 x 20 cm para distancias de detección superiores a 40 cm) o una placa de acero laminado en caliente y probarlo en condiciones similares... En general, en diferentes industrias, de diferentes maneras.
Para una normalización más precisa, la distancia se vuelve a calcular de acuerdo con una tabla especial que refleja las propiedades reflectantes de diferentes materiales y, por lo tanto, se agrega un factor de corrección. Por ejemplo, un sensor tiene un valor de 100 mm, pero desea monitorear, digamos, objetos de acero inoxidable.
El factor de corrección será de 7,5, lo que significa que la distancia de actuación segura será 7,5 veces mayor, es decir, 750 mm. El tamaño más pequeño del objeto está determinado por sus propiedades reflectantes, contraste y reserva funcional.
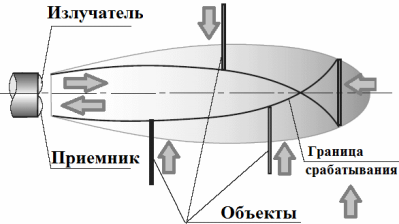
Reflejo (tipo R)
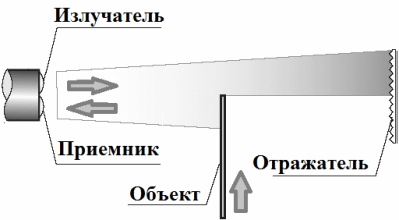
Aquí se utiliza la luz reflejada por el reflector. Un receptor con un emisor en una carcasa, el haz que incide sobre el reflector se refleja, incide en el receptor y se dispara. Cuando el objeto sale del área de trabajo, se produce otro desencadenante. Los sensores de este tipo pueden trabajar a una distancia de hasta 10 metros y se utilizan para fijar objetos translúcidos.