¿Qué es un transformador diferencial lineal?
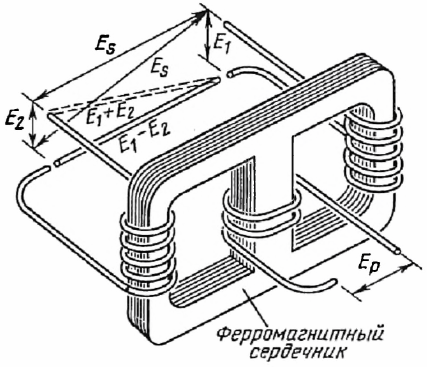
Una corriente alterna que fluye en una bobina primaria puede usarse para inducir un voltaje alterno en dos bobinas secundarias. Si los dos devanados secundarios son idénticos en sus características y las dos trayectorias de las líneas de campo magnético que pasan a través de estas bobinas también son idénticas, entonces los dos voltajes secundarios generados serán iguales. Un dispositivo con esta estructura se llama transformador diferencial.

Un transformador diferencial puede tener un núcleo de aire o un núcleo magnético.
Dos devanados secundarios se pueden conectar en fase o en antifase, en el primer caso se suman sus voltajes y en el segundo se restan uno del otro.
Se utiliza un devanado primario para impulsar dos devanados secundarios simétricos, el último de los cuales se puede conectar para que los voltajes secundarios se sumen o se resten entre sí.
Si dos bobinas están conectadas de acuerdo con un esquema de resta, entonces, con los mismos valores de sus voltajes, el voltaje secundario total será cero.Si las características del circuito magnético de una de estas bobinas se alteran intencionalmente en comparación con las características del circuito magnético de la otra bobina, entonces los dos voltajes secundarios serán diferentes y su diferencia no será cero.
En estas condiciones, la fase de la tensión secundaria total indica qué trayecto de las líneas del campo magnético tiene mayor resistencia, mientras que la amplitud de esta tensión refleja el valor de la diferencia de reluctancia.
Si se utiliza la misma acción para aumentar la resistencia magnética de un camino y para disminuir la resistencia magnética del otro camino, entonces el voltaje de salida que refleja esta acción alcanza su valor máximo y la función de transferencia tendrá la mayor linealidad posible.
Dado que no se pueden hacer exactamente iguales dos devanados secundarios ni dos caminos de líneas de campo magnético, un transformador diferencial siempre tiene un voltaje de salida definido, incluso con una señal útil cero en la entrada.
Además, las características de los circuitos magnéticos no son lineales. Como resultado de esta no linealidad, incluso aparecen componentes armónicos de la frecuencia fundamental de la tensión de excitación primaria aplicada, que no pueden compensarse completamente en ninguna disposición de los devanados secundarios.
La reluctancia de un circuito ferromagnético de entrehierro es una función del ancho del entrehierro con fuerte no linealidad. Como resultado, la inductancia de una bobina enrollada alrededor de dicho circuito también es una función no lineal del ancho del espacio.
Al mismo tiempo, si hay dos trayectorias más o menos idénticas de las líneas del campo magnético, cada una con un espacio de aire, y si el ancho de un espacio aumenta a medida que disminuye el ancho del otro, entonces la diferencia en la resistencia magnética de estos las trayectorias pueden variar suficientemente linealmente.
Los principios básicos del transformador diferencial se materializan en la práctica en una variedad de configuraciones de diseño específicas para muchos propósitos diferentes.
Transformador diferencial variable lineal (LVDT) es un transductor (sensor) pasivo que funciona según el principio de inducción mutua y se puede utilizar para medir el desplazamiento, la tensión, la presión y el peso.
La mayoría de las veces, el uso de NS se puede usar para medir el desplazamiento en el rango de varios milímetros a centímetros, convirtiendo directamente el desplazamiento en una señal eléctrica.
La inductancia de la bobina cerca o dentro de la cual se encuentra la barra ferromagnética es una función de la coordenada de la posición de esta barra con respecto a la bobina con fuerte no linealidad.
Si tal barra es un circuito ferromagnético de algún transformador diferencial, entonces el voltaje diferencial secundario puede servir como indicador del desplazamiento de la barra, dependiendo linealmente de este desplazamiento.
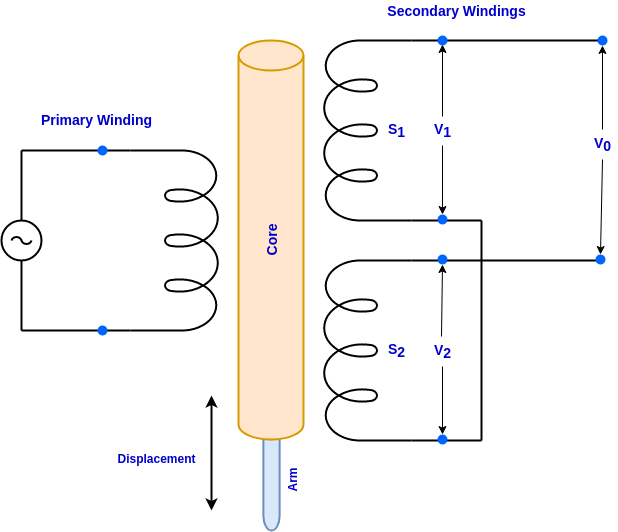
El devanado primario está conectado a una fuente de CA. Los dos devanados secundarios S1 y S2 tienen el mismo número de vueltas y están montados en serie uno frente al otro.
Por lo tanto, la FEM inducida en estos devanados está desfasada 180° entre sí y, por lo tanto, el efecto general se cancela.

La posición del núcleo ferromagnético simétrico provisto en el diseño del transformador diferencial se puede determinar a partir de la fase y amplitud del voltaje secundario.
La diferencia absoluta entre los dos voltajes secundarios indica el valor absoluto del desplazamiento de la varilla con respecto al centro o posición cero, y la fase de este voltaje diferente indica la dirección del desplazamiento.
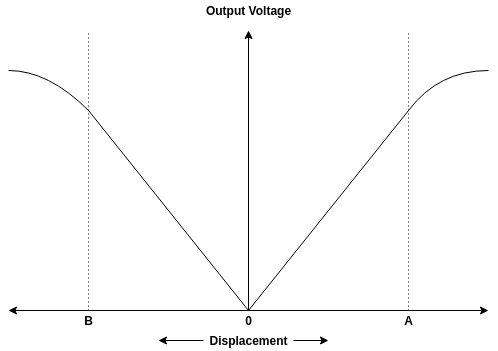
La curva B/I de un transformador diferencial variable lineal se muestra en la figura.
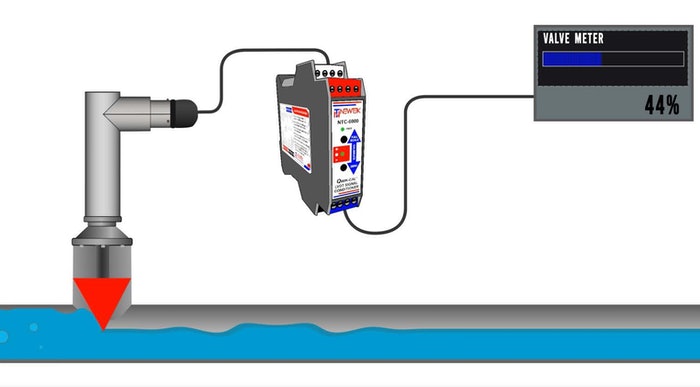
Un ejemplo del uso de un transformador diferencial lineal para proporcionar retroalimentación de posición precisa para el monitoreo y control de válvulas en plantas químicas, plantas de energía y equipos agrícolas:
Sensores de desplazamiento sumergibles LVDT D5W:
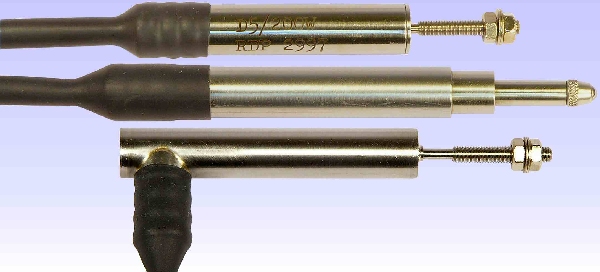
Estos transductores están diseñados para medir el desplazamiento y la posición. Proporcionan una medición precisa de la posición de la armadura (parte deslizante) en relación con la carcasa del sensor de desplazamiento.
Los transductores de desplazamiento sumergibles están diseñados para tomar medidas mientras están sumergidos en líquidos adecuados. Los líquidos no magnéticos pueden inundar el tubo del inducido sin afectar el funcionamiento del convertidor. Estos convertidores están disponibles en versiones no controladas o de retorno por resorte.
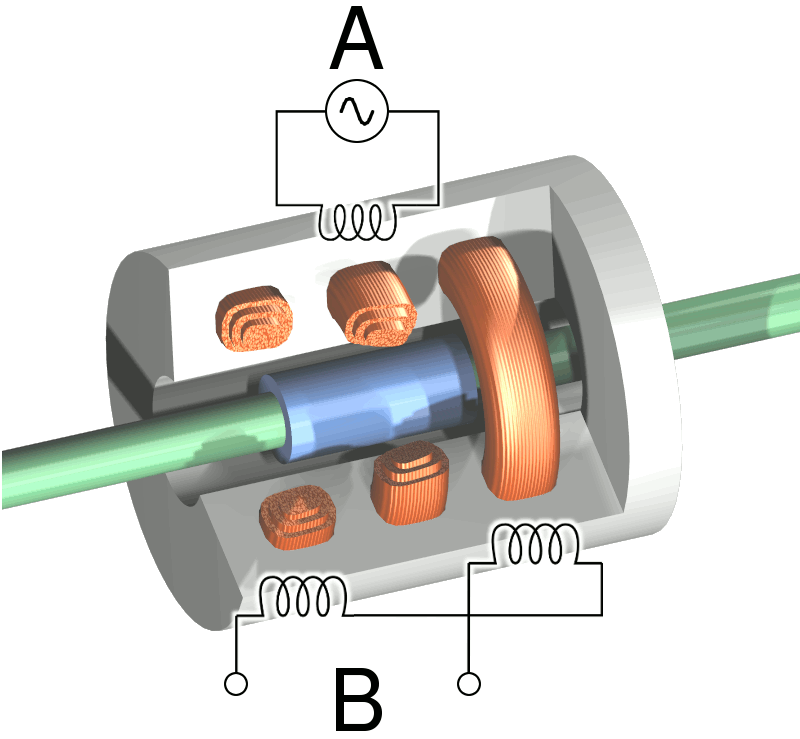
Cuando se automatizan varios procesos tecnológicos, a menudo se usan convertidores bilaterales con un transformador diferencial con un núcleo ferromagnético, que se inserta en sus extremos a distancias iguales en las dos bobinas secundarias.
A medida que la varilla se mueve axialmente, se adentra más en una de estas bobinas y se extiende desde la otra.La diferencia absoluta entre los dos voltajes secundarios indica el valor absoluto del desplazamiento de la varilla con respecto al centro o posición cero, y la fase de este voltaje diferente indica la dirección del desplazamiento.
Transformador diferencial de CA rotatorio:
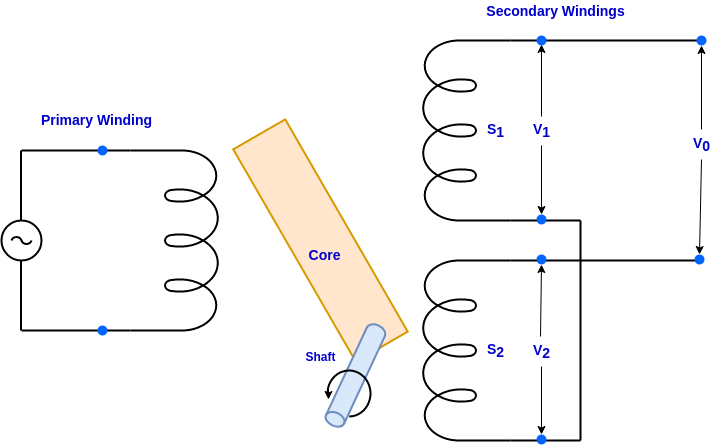
Un transformador diferencial rotativo variable es un transformador pasivo basado en el principio de inducción mutua. Se utiliza para medir el desplazamiento angular.
Su diseño es similar al de un transformador diferencial variable lineal excepto por la construcción del núcleo.
El devanado primario está conectado a una fuente de CA. Los dos devanados secundarios S1 y S2 tienen el mismo número de vueltas y están montados en serie uno frente al otro.
Ventajas del transformador diferencial lineal:
-
No hay contacto físico entre el núcleo y las bobinas;
- Alta fiabilidad;
-
Respuesta rápida;
-
Larga vida útil.
Es el sensor inductivo más utilizado debido a su alta precisión.