Selección de motores eléctricos para accionamientos auxiliares de máquinas para corte de metales
 Los accionamientos auxiliares de las máquinas herramienta (accionamientos rápidos para calibradores, almohadillas para la cabeza, brazos transversales, etc.) normalmente funcionan en un modo de carga de tiempo breve. El modo de funcionamiento del accionamiento eléctrico de tal duración, en el que la temperatura de todos los dispositivos incluidos en el accionamiento eléctrico no alcanza un valor estacionario durante el funcionamiento y desciende a la temperatura ambiente durante una pausa, se denomina a corto plazo.
Los accionamientos auxiliares de las máquinas herramienta (accionamientos rápidos para calibradores, almohadillas para la cabeza, brazos transversales, etc.) normalmente funcionan en un modo de carga de tiempo breve. El modo de funcionamiento del accionamiento eléctrico de tal duración, en el que la temperatura de todos los dispositivos incluidos en el accionamiento eléctrico no alcanza un valor estacionario durante el funcionamiento y desciende a la temperatura ambiente durante una pausa, se denomina a corto plazo.
El tiempo de funcionamiento de los accionamientos auxiliares en las máquinas de corte de metales suele ser breve; no supera 5—15 s, y solo para máquinas pesadas alcanza 1—1,5 minutos. Durante este tiempo (t < 0,1T) con una sobrecarga dentro de los límites permisibles, el motor eléctrico no tiene tiempo de calentarse ni siquiera al sobrecalentamiento normal. La potencia nominal del motor eléctrico en este caso está determinada por las condiciones de sobrecarga.
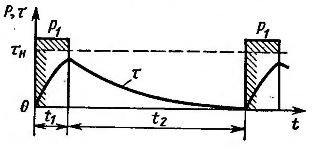
Arroz. 1. Curva de carga para funcionamiento a corto plazo
El momento de resistencia Mc durante el funcionamiento de los accionamientos auxiliares se crea principalmente por fuerzas de fricción y, por lo tanto, estos accionamientos, a diferencia de los accionamientos del movimiento principal, requieren un par de arranque significativo.
Potencia consumida para vencer las fuerzas de fricción al mover un elemento de máquina en movimiento horizontal:

donde Ftp — fuerza de fricción, N; v — velocidad, m/s; G — la gravedad (peso) de la unidad que se mueve, N; μ — coeficiente de fricción del movimiento.
Potencia del eje del motor P = Ptr /η,
donde η — c. P. D. Transmisión, típicamente η = 0.1 — 0.2.
El calentamiento del motor eléctrico durante el funcionamiento en el modo considerado es insignificante. Por lo tanto, se recomienda utilizar su sobrecarga permisible.
Potencia nominal Pn = Ptr /(λη),
donde λ — coeficiente de sobrecarga admisible.
A grandes rasgos, se puede considerar que la característica del motor en su parte de trabajo es clara. Entonces la velocidad angular del motor en operación de sobrecarga
ωλ = ωО (1 — λсн),
donde, ωО = (πнО)/30- velocidad angular síncrona del motor eléctrico.
Usando la fórmula Pn = Ptr /(λη), encuentre el par de sobrecarga del motor
El momento de resistencia al inicio del arranque del motor es mayor que durante su funcionamiento. Este momento
donde μО — coeficiente de fricción en reposo.
El procedimiento para seleccionar motores eléctricos de los accionamientos auxiliares de la máquina.
En primer lugar, utilizando la fórmula Pn = Ptr /(λη) se selecciona un motor eléctrico del catálogo, para el que se determina el par de arranque Mnach. Calcule el momento Mso mediante la fórmula y compárelo con el momento Mnach.Si 0,85 Mnig> Mso, entonces el motor seleccionado es adecuado para el accionamiento auxiliar.
Los accionamientos para las unidades de máquinas giratorias y elevadoras se calculan de manera similar, solo que en el último caso, la carga principal a menudo es creada por la fuerza de gravedad (peso) de la unidad movida.
Es de particular importancia elegir la velocidad óptima para acercar rápidamente la herramienta a la pieza de trabajo. Al acercarse a la herramienta, el movimiento de alta velocidad se reemplaza por un movimiento lento a velocidad de corte. Este cambio de velocidad ocurre cuando la herramienta está a cierta distancia de la pieza, de lo contrario, la herramienta golpeará la pieza a alta velocidad y se romperá.
La transición de una velocidad a otra lleva algún tiempo. Durante este tiempo, los equipos eléctricos se activan y el movimiento continúa a alta velocidad, el tiempo de respuesta de los equipos cambia debido a las fluctuaciones de voltaje y la influencia de otros factores aleatorios.
La velocidad óptima la proporciona la selección adecuada de engranajes en la cadena cinemática. Una reducción adicional del tiempo es posible mediante una reducción automática gradual o suave de la velocidad del tramo final de la carretera, lo que permite adoptar una velocidad inicial más alta.