Formas estructurales de motores asíncronos.
 Formas estructurales externas motores asíncronos están determinados por la forma en que se monta el motor y la forma de su protección contra la influencia del medio ambiente. El rendimiento motor normal de las piernas está muy extendido (Fig. 1, a). En este caso, el eje del motor debe estar horizontal. Los motores con bridas (Fig. 1, b) se usan ampliamente para instalaciones horizontales y verticales.
Formas estructurales externas motores asíncronos están determinados por la forma en que se monta el motor y la forma de su protección contra la influencia del medio ambiente. El rendimiento motor normal de las piernas está muy extendido (Fig. 1, a). En este caso, el eje del motor debe estar horizontal. Los motores con bridas (Fig. 1, b) se usan ampliamente para instalaciones horizontales y verticales.
También producen motores de inducción en línea que no tienen marco, protectores de extremo, eje. Los elementos de dicho motor están incrustados en las partes del cuerpo de la máquina, y el eje del motor es uno de los ejes de la máquina (a menudo el husillo), y la cama es el cuerpo del conjunto de la máquina, por ejemplo, un cabezal de rectificado (Fig. . 2).
Los motores de diseño especial están ampliamente distribuidos en el extranjero, incluyendo motores con pequeñas dimensiones radiales y una longitud considerable, y motores de disco, particularmente con un estator en forma de cilindro y un rotor exterior en forma de anillo. También se utilizan motores, cuando se encienden, el rotor, que tiene forma de cono, se mueve en dirección axial, desarrollando una fuerza de empuje importante.
Esta fuerza se utiliza para liberar el freno mecánico que actúa sobre el eje del motor después de desconectar el motor de la red eléctrica. Además, se utilizan numerosos diseños de motores con cajas de cambios adjuntas, cajas de cambios y variadores mecánicos que proporcionan una regulación suave.
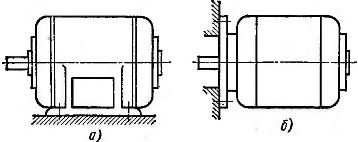
Arroz. 1. Diseño de motores asíncronos
La desventaja de usar motores con formas de diseño especiales es la dificultad de reemplazarlos en caso de accidente. Un motor eléctrico defectuoso no debe reemplazarse, sino repararse, y la máquina debe permanecer en ralentí durante la reparación.
Se utilizan motores con diversas formas de protección ambiental para impulsar las máquinas.
Los motores blindados tienen rejillas que cubren las ventilaciones en los protectores de los extremos. Esto evita que entren objetos extraños en el motor y también evita que el trabajador toque piezas giratorias y vivas. Para evitar que caigan gotas de líquido desde arriba, los motores están equipados con ventilaciones hacia abajo o verticales.
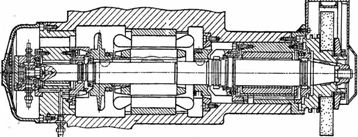
Arroz. 2. Motor de molienda incorporado
Sin embargo, cuando un motor eléctrico de este tipo funciona en un taller, su ventilador, junto con el aire, aspira polvo, rocía refrigerante o aceite, así como pequeñas partículas de acero o hierro fundido, que, adhiriéndose al aislamiento del bobinado y vibrando bajo la influencia de un campo magnético alterno, desgasta rápidamente el aislamiento.
Los motores cerrados, cuyas pantallas finales no tienen orificios de ventilación, tienen una protección más confiable contra las influencias ambientales. Dichos motores, con las mismas dimensiones que los protegidos, debido a una peor refrigeración, tienen menos potencia.Con las mismas potencias y velocidades, el motor eléctrico cerrado es 1,5-2 veces más pesado que el protegido y, en consecuencia, su precio es más elevado.
El deseo de reducir el tamaño y el costo de los motores cerrados condujo a la creación de motores eléctricos de soplado cerrado. Dicho motor eléctrico tiene un ventilador externo montado en el extremo del eje del motor opuesto al extremo impulsor y cubierto con una tapa. Este ventilador sopla alrededor de la carcasa del motor.
Los motores de los ventiladores son significativamente más ligeros y económicos que los cerrados. Los motores soplados se utilizan con mayor frecuencia para impulsar máquinas de corte de metales. Los motores con otras formas de protección ambiental se utilizan relativamente raramente para accionar máquinas de corte de metales. En particular, a veces se utilizan motores eléctricos cerrados para accionar máquinas rectificadoras.
Los motores eléctricos están diseñados para voltajes estándar de 127, 220 y 380 V. Un mismo motor se puede conectar a redes con diferentes voltajes, por ejemplo, a redes con voltajes de 127 y 220 V, 220 y 380 V. con dos voltajes, el el devanado del estator del motor eléctrico está conectado en un triángulo, para uno más grande, en una estrella. La corriente en los devanados del motor eléctrico y el voltaje en ellos serán los mismos en ambos casos con esta inclusión. Además, producen motores eléctricos de 500 V, sus estatores están permanentemente conectados en estrella.
Los motores asíncronos de jaula de ardilla utilizados en muchas industrias se fabrican con una potencia nominal de 0,6-100 kW por velocidades sincrónicas 600, 750, 1000, 1500 y 3000 rpm.
La sección transversal de los cables del devanado del motor eléctrico depende de la magnitud de la corriente que lo atraviesa. Con una corriente mayor, el devanado del motor tendrá un volumen mayor.La sección transversal del circuito magnético es proporcional a la magnitud del flujo magnético. De esta forma, las dimensiones del motor eléctrico vienen determinadas por los valores calculados de corriente y flujo magnético o el par nominal del motor eléctrico. Potencia nominal del motor

donde P.n — potencia nominal, kW, Mn- momento nominal, N • m, nn- velocidad nominal, rpm.
La potencia nominal para el mismo tamaño de motor aumenta a medida que aumenta su velocidad nominal. Por lo tanto, los motores eléctricos de baja velocidad son más grandes que los motores de alta velocidad de la misma potencia.
Al rectificar agujeros pequeños, se requieren velocidades de husillo de rectificado muy altas para obtener velocidades de corte adecuadas. Entonces, al rectificar con una rueda de 3 mm de diámetro a una velocidad de solo 30 m / s, la velocidad del husillo debe ser igual a 200,000 revoluciones por minuto. A altas velocidades del husillo, la fuerza de sujeción se puede reducir drásticamente. Al mismo tiempo, se reducen el rectificado de ruedas y la flexión del mandril, y se aumentan el acabado de la superficie y la precisión del mecanizado.
En relación con lo anterior, la industria utiliza numerosos modelos de los llamados. Husillos eléctricos con velocidades de rotación de 12.000-144.000 rpm y superiores. El electrohusillo (Fig. 3, a) es un husillo de rectificado sobre rodamientos con un motor de jaula de ardilla de alta frecuencia incorporado. El rotor del motor está ubicado entre dos cojinetes en el extremo del husillo opuesto a la muela abrasiva.
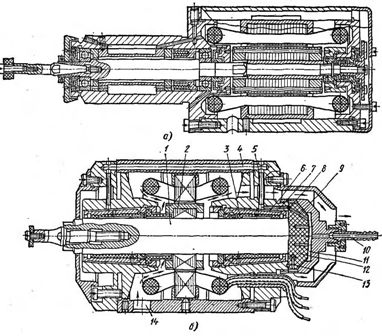
Arroz. 3. Electrohusillos
El estator del husillo eléctrico se ensambla a partir de chapa de acero eléctrico. Se le coloca una bobina bipolar.El rotor del motor a velocidades de hasta 30.000-50.000 rpm también se marca a partir de chapa y se suministra con un devanado de cortocircuito convencional. Tienden a reducir al máximo el diámetro del rotor.
La elección del tipo de rodamiento es de particular importancia para el funcionamiento de los electromandriles. Comúnmente se utilizan rodamientos de bolas de precisión, que funcionan con una precarga creada mediante resortes calibrados. Dichos rodamientos se utilizan para velocidades de rotación que no superan las 100.000 revoluciones por minuto.
Los cojinetes aerostáticos se utilizan ampliamente en la industria (Fig. 3, b). El eje 1 del motor eléctrico de alta frecuencia gira en cojinetes lubricados por aire 3. La carga axial es absorbida por el colchón de aire entre el extremo del eje y el cojinete de apoyo 12, contra el cual se presiona el eje bajo la presión del aire suministrado al interior de la carcasa a través del orificio 14 para la refrigeración del motor. El aire comprimido pasa por el filtro y entra por el racor 10 en la cámara 11. Desde aquí, por el canal 9 y la ranura circular 8, el aire pasa al canal 7 y a la cámara 6. Desde allí, el aire entra en el cojinete brecha. El aire se suministra al cojinete izquierdo a través de los tubos 5 y los canales 4 en la carcasa del motor.
El aire de escape se descarga a través de los canales 13. El colchón de aire en el entrehierro del cojinete de apoyo se crea por el aire que pasa desde la cámara 11 a través del cojinete hecho de grafito de carbono poroso. Cada cojinete tiene latón cónico. Se presiona un revestimiento de grafito de carbono, cuyos poros se rellenan con bronce. Antes de poner en marcha el electrohusillo, se suministra aire y se forman cojines de aire entre el husillo y los casquillos. Esto elimina la fricción y el desgaste de los rodamientos durante el arranque.Después de eso, el motor se enciende, la velocidad del rotor 2 alcanza la velocidad nominal en 5-10 s. Cuando se apaga el motor, el rotor 2 se mueve por inercia durante 3-4 minutos. Para reducir este tiempo, se utiliza un freno eléctrico.
El uso de bolsas de aire reduce drásticamente las pérdidas por fricción en el husillo eléctrico, el consumo de aire es de 6-25 m3/h.
También se han utilizado electrohusillos sobre cojinetes con lubricación líquida. Su funcionamiento requiere una circulación continua de aceite a alta presión, de lo contrario, el calentamiento de los cojinetes se vuelve inaceptable.
La producción de motores eléctricos de alta frecuencia requiere una fabricación precisa de las piezas individuales, un equilibrado dinámico del rotor, un montaje preciso y una estricta uniformidad del espacio entre el estator y el rotor. La frecuencia de la corriente que alimenta el motor eléctrico de alta frecuencia se selecciona según la velocidad requerida del motor eléctrico:

donde nSi la frecuencia síncrona de rotación del motor eléctrico, rpm, f es la frecuencia de la corriente, Hz, p es el número de polos, ya que p = 1, entonces

A velocidades de rotación síncrona de los husillos eléctricos de 12.000 y 120.000 rpm, la frecuencia de corriente debe ser igual a 200 y 2000 Hz, respectivamente.
Se utilizan generadores especiales para alimentar motores de alta frecuencia. En la Fig. 4 muestra un generador de inducción síncrono trifásico. El estator del generador tiene ranuras anchas y estrechas. La bobina de campo, que se encuentra en las ranuras anchas del estator, recibe corriente continua. El campo magnético de los conductores de esta bobina se cierra a través de los dientes del estator y las protuberancias del rotor, como se muestra en la fig. 4 con línea punteada.
Cuando el rotor gira, el campo magnético que se mueve a lo largo de las protuberancias del rotor cruza las vueltas del devanado de corriente alterna ubicado en las ranuras estrechas del estator e induce una alterna e. etc. C. La frecuencia de este e. etc. v. depende de la velocidad y el número de orejas del rotor. Las fuerzas electromotrices inducidas por el mismo flujo en los devanados de campo se anulan entre sí debido a la inminente activación de las bobinas. Las bobinas de campo son alimentadas por un rectificador conectado a la red eléctrica. El estator y el rotor tienen núcleos magnéticos de chapa de acero eléctrico.
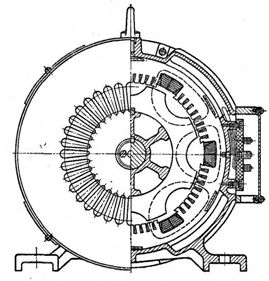
Arroz. 4. Generador de inducción de alta frecuencia
Los generadores con el diseño descrito se producen para potencias nominales de 1 a 3 kW y frecuencias de 300 a 2400 Hz. Los generadores son accionados por motores asíncronos con una velocidad síncrona de 3000 rpm.
Los generadores de inducción con mayor frecuencia están comenzando a ser reemplazados por convertidores de semiconductores (tiristores). En este caso, suelen proporcionar la posibilidad de cambiar la frecuencia de la corriente y por tanto la posibilidad de ajustar la velocidad de giro del motor eléctrico. Si durante dicha regulación el voltaje se mantiene constante, entonces se realiza una regulación de potencia constante. Si la relación entre la tensión y la frecuencia de la corriente (y, por lo tanto, el flujo magnético del motor) se mantiene constante, la regulación se lleva a cabo con un par admisible constante a todas las velocidades durante mucho tiempo.
Las ventajas de los accionamientos con convertidor de frecuencia de tiristores y motor asíncrono de jaula de ardilla son la alta eficiencia y la facilidad de uso. La desventaja sigue siendo el alto precio.En ingeniería mecánica, lo más recomendable es utilizar un accionamiento de este tipo para motores de alta frecuencia. En nuestro país se han creado unidades experimentales de este tipo.
Los motores asíncronos bifásicos de baja potencia se utilizan a menudo en accionamientos ejecutivos de máquinas herramienta. El estator de dicho motor tiene dos devanados: devanado de campo 1 y devanado de control 2 (Fig. 5, a). El rotor 4 en una jaula de ardilla tiene una gran resistencia activa. Los ejes de las bobinas son perpendiculares entre sí.
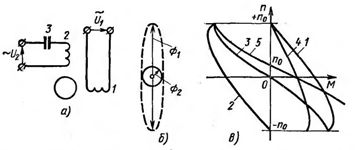
Arroz. 5. Esquema de un motor de inducción bifásico y sus características.
Los voltajes Ul y U2 se aplican a los devanados. Cuando el condensador 3 está conectado al circuito de la bobina 2, la corriente en él excede la corriente en la bobina 1. En este caso, se forma un campo magnético elíptico giratorio y el rotor 4 de la ardilla comienza a girar. Si reduce el voltaje U2, la corriente en la bobina 2 también disminuirá. Esto conducirá a un cambio en la forma de la elipse del campo magnético giratorio, que se vuelve cada vez más alargada (Fig. 5, b).
Un motor de campo elíptico se puede considerar como dos motores en un eje, uno operando con un campo pulsante F1 y el otro con un campo circular F2. El motor de campo pulsante F1 se puede considerar como dos motores de inducción de campo circular idénticos cableados para girar en direcciones opuestas.
En la Fig. 5, c muestra las características mecánicas 1 y 2 de un motor de inducción con un campo giratorio circular y una resistencia activa significativa del rotor cuando gira en diferentes direcciones. La característica mecánica 3 de un motor monofásico se puede construir restando los momentos M de las características 1 y 2 por cada valor de n.En cualquier valor de n, se detiene el par de un motor monofásico con alta resistencia de rotor. La característica mecánica del motor de campo circular está representada por la curva 4.
La característica mecánica 5 de un motor bifásico se puede construir restando los momentos M de las características 3 y 4 en cualquier valor de n. El valor de n0 es la velocidad de rotación de un motor de inducción de dos fases a la velocidad de ralentí ideal. Al ajustar la corriente de suministro de la bobina 2 (Fig. 5, a), es posible cambiar la pendiente de la característica 4 (Fig. 5, c) y, por lo tanto, el valor de n0. De esta forma se realiza el control de velocidad de un motor de inducción bifásico.
Cuando se opera con altos valores de deslizamiento, las pérdidas en el rotor se vuelven bastante significativas. Por este motivo, la regulación considerada solo se utiliza para accionamientos auxiliares de baja potencia. Para reducir el tiempo de aceleración y desaceleración, se utilizan motores de inducción bifásicos con rotor hueco. En tal motor, el rotor es un cilindro hueco de aluminio de paredes delgadas.