Máquinas síncronas: motores, generadores y compensadores
 Las máquinas síncronas son máquinas eléctricas de corriente alterna en las que el rotor y el campo magnético de las corrientes del estator giran de forma síncrona.
Las máquinas síncronas son máquinas eléctricas de corriente alterna en las que el rotor y el campo magnético de las corrientes del estator giran de forma síncrona.
Los generadores síncronos trifásicos son las máquinas eléctricas más potentes. La potencia unitaria de los generadores síncronos en las centrales hidroeléctricas es de 640 MW y en las centrales térmicas de 8 a 1200 MW. En una máquina síncrona, uno de los devanados está conectado a una red eléctrica de CA y el otro está excitado por CC. El devanado de corriente alterna se llama devanado de armadura.
El devanado del inducido convierte toda la potencia electromagnética de la máquina síncrona en potencia eléctrica y viceversa. Por lo tanto, generalmente se coloca en un estator, que se denomina armadura. La bobina de excitación consume del 0,3 al 2% de la potencia convertida, por lo que generalmente se encuentra en un rotor giratorio, que se denomina inductor, y la baja potencia de excitación se suministra mediante anillos deslizantes o dispositivos de excitación sin contacto.
 El campo magnético del inducido gira a una velocidad síncrona n1 = 60f1 / p, rpm, donde p = 1,2,3…64, etc. es el número de pares de polos.
El campo magnético del inducido gira a una velocidad síncrona n1 = 60f1 / p, rpm, donde p = 1,2,3…64, etc. es el número de pares de polos.
Con frecuencia de red industrial f1 = 50 Hz, un número de velocidades síncronas en diferente número de polos: 3000, 1500, 1000, etc.). Dado que el campo magnético del inductor es estacionario en relación con el rotor, para la interacción continua de los campos del inductor y la armadura, el rotor debe girar a la misma velocidad sincrónica.
 Construcción de máquinas síncronas
Construcción de máquinas síncronas
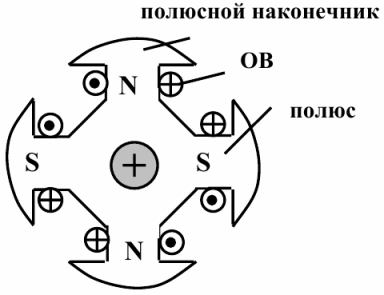
El estator de una máquina síncrona con un devanado trifásico no difiere en la construcción. estator de máquina asíncrona, y el rotor con una bobina de excitación es de dos tipos: polo prominente y polo implícito. A altas velocidades y con un pequeño número de polos se utilizan rotores de polos implícitos porque tienen una estructura más duradera, ya bajas velocidades y con un gran número de polos se utilizan rotores de polos salientes de construcción modular. La fuerza de tales rotores es menor, pero son más fáciles de fabricar y reparar. Rotor polar aparente:
 Se utilizan en máquinas síncronas con un gran número de polos y un n correspondientemente bajo. Centrales hidroeléctricas (hidrogeneradores). frecuencia n de 60 a varios cientos de revoluciones por minuto. Los hidrogeneradores más potentes tienen un diámetro de rotor de 12 m con una longitud de 2,5 m, p — 42 y n = 143 rpm.
Se utilizan en máquinas síncronas con un gran número de polos y un n correspondientemente bajo. Centrales hidroeléctricas (hidrogeneradores). frecuencia n de 60 a varios cientos de revoluciones por minuto. Los hidrogeneradores más potentes tienen un diámetro de rotor de 12 m con una longitud de 2,5 m, p — 42 y n = 143 rpm.
Rotor indirecto:
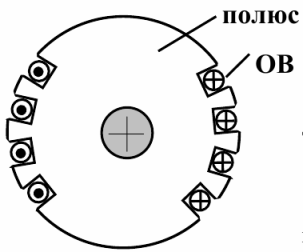 Devanado — diámetro d = 1,2 — 1,3 m en los canales del rotor, la longitud activa del rotor no supera los 6,5 m TPP, NPP (generadores de turbina). S = 500.000 kVA en una máquina n = 3000 o 1500 rpm (1 o 2 pares de polos).
Devanado — diámetro d = 1,2 — 1,3 m en los canales del rotor, la longitud activa del rotor no supera los 6,5 m TPP, NPP (generadores de turbina). S = 500.000 kVA en una máquina n = 3000 o 1500 rpm (1 o 2 pares de polos).
Además de la bobina de campo, en el rotor se encuentra un amortiguador o bobina amortiguadora, que se utiliza para arrancar motores síncronos. Esta bobina está hecha de manera similar a una bobina de cortocircuito de jaula de ardilla, solo que de una sección mucho más pequeña, ya que el volumen principal del rotor lo ocupa la bobina de campo.En los rotores de polos no uniformes, el papel del devanado amortiguador lo desempeñan las superficies de los dientes sólidos del rotor y las cuñas conductoras en los canales.
La corriente continua en el devanado de excitación de una máquina síncrona se puede suministrar desde un generador de CC especial instalado en el eje de la máquina y llamado excitador, o desde la red eléctrica a través de un rectificador de semiconductores.  Ver también sobre este tema:
Ver también sobre este tema:
Propósito y disposición de las máquinas síncronas.
Cómo funcionan los turbogeneradores e hidrogeneradores síncronos
Una máquina síncrona puede funcionar como generador o como motor. Una máquina síncrona puede funcionar como un motor si se suministra corriente de red trifásica al devanado del estator. En este caso, como resultado de la interacción de los campos magnéticos del estator y del rotor, el campo del estator arrastra consigo al rotor. En este caso, el rotor gira en el mismo sentido ya la misma velocidad que el campo del estator.

El modo generador de funcionamiento de las máquinas síncronas es el más común, y casi toda la energía eléctrica es generada por generadores síncronos.Los motores síncronos se utilizan con potencias superiores a 600 kW y hasta 1 kW como micromotores. Los generadores síncronos para voltajes de hasta 1000 V se utilizan en unidades para sistemas de suministro de energía autónomos.
Las unidades con estos generadores pueden ser estacionarias y móviles. La mayoría de las unidades se utilizan con motores diésel, pero pueden funcionar con turbinas de gas, motores eléctricos y motores de gasolina.
Un motor síncrono se diferencia de un generador síncrono solo por una bobina amortiguadora de arranque, que debería garantizar buenas propiedades de arranque del motor.
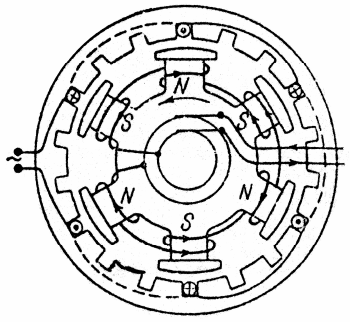
Esquema de un generador síncrono de seis polos.Se muestran las secciones transversales de los devanados de una fase (tres devanados conectados en serie). Los devanados de las otras dos fases encajan en las ranuras libres que se muestran en la figura. Las fases están conectadas en estrella o delta.
Modo generador: ¿el motor (turbina) hace girar el rotor, cuya bobina recibe un voltaje constante? hay una corriente que crea un campo magnético permanente. El campo magnético gira con el rotor, cruza los devanados del estator e induce una FEM de la misma magnitud y frecuencia pero desplazada en 1200 (sistema trifásico simétrico).
Modo motor: el devanado del estator está conectado a una red trifásica y el devanado del rotor a una fuente de corriente continua. Como resultado de la interacción del campo magnético giratorio de la máquina con la corriente continua de la bobina de excitación, se produce un par Mvr, que impulsa al rotor a girar a la velocidad del campo magnético.
La característica mecánica de un motor síncrono — dependencia n (M) — es una sección horizontal.
Tira de película educativa - "Motores síncronos" producidos por la fábrica de materiales educativos en 1966.
Puedes verlo aquí: Filmstrip «Synchronous Motor»
 Aplicación de motores síncronos El uso masivo de motores asíncronos con una subcarga significativa complica la operación de sistemas y estaciones de potencia: el factor de potencia en el sistema disminuye, lo que conduce a pérdidas adicionales en todos los dispositivos y líneas, así como a su uso insuficiente en términos de potencia activa. Por lo tanto, se hizo necesario el uso de motores síncronos, especialmente para mecanismos con accionamientos potentes.
Aplicación de motores síncronos El uso masivo de motores asíncronos con una subcarga significativa complica la operación de sistemas y estaciones de potencia: el factor de potencia en el sistema disminuye, lo que conduce a pérdidas adicionales en todos los dispositivos y líneas, así como a su uso insuficiente en términos de potencia activa. Por lo tanto, se hizo necesario el uso de motores síncronos, especialmente para mecanismos con accionamientos potentes.
Los motores síncronos tienen una gran ventaja sobre los motores asíncronos, y es que, gracias a la excitación DC, pueden trabajar con cosphi = 1 y no consumen potencia reactiva de la red, y durante el funcionamiento, cuando se sobreexcitan, incluso dan potencia reactiva al motor. red. Como resultado, se mejora el factor de potencia de la red y se reducen las caídas y pérdidas de tensión en la misma, así como el factor de potencia de los generadores que operan en las centrales eléctricas.
El par máximo de un motor síncrono es proporcional a U, y para un motor asíncrono U2.
Por lo tanto, cuando cae el voltaje, el motor síncrono retiene una mayor capacidad de carga. Además, el aprovechamiento de la posibilidad de aumentar la corriente de excitación de los motores síncronos permite aumentar su fiabilidad en caso de caídas de tensión de emergencia en la red y mejorar en estos casos las condiciones de funcionamiento del sistema de potencia en su conjunto. Debido al mayor tamaño del entrehierro, las pérdidas adicionales en el acero y en la jaula del rotor de los motores síncronos son menores que las de los motores asíncronos, por lo que la eficiencia de los motores síncronos suele ser mayor.
Por otro lado, la construcción de los motores síncronos es más complicada que la de los motores de inducción de jaula de ardilla y, además, los motores síncronos deben tener un excitador u otro dispositivo para alimentar una bobina de CC. Como resultado, los motores síncronos son en la mayoría de los casos más caros que los motores asíncronos de jaula de ardilla.
Durante el funcionamiento de los motores síncronos, surgieron considerables dificultades para arrancarlos.Estas dificultades ya han sido superadas.

El arranque y el control de la velocidad de los motores síncronos también son más difíciles. Sin embargo, la ventaja de los motores síncronos es tal que a altas potencias es recomendable utilizarlos donde no se requieran arranques y paradas frecuentes y control de velocidad (motores generadores, bombas potentes, ventiladores, compresores, molinos, trituradoras, etc.). ).
Ver también:
Esquemas típicos para arrancar motores síncronos.
Propiedades electromecánicas de motores síncronos
Compensadores síncronos
Los compensadores síncronos están diseñados para compensar el factor de potencia de la red y mantener el nivel de voltaje normal de la red en áreas donde se concentran las cargas de los consumidores. El modo de funcionamiento sobreexcitado del compensador síncrono es normal cuando suministra potencia reactiva a la red.
En este sentido, los compensadores, así como los bancos de condensadores que sirven para los mismos fines, instalados en las subestaciones de consumo, también se denominan generadores de energía reactiva. Sin embargo, en periodos de cargas reducidas de los usuarios (por ejemplo, por la noche), muchas veces es necesario el uso de compensadores síncronos y en modo de subexcitación, cuando estos consumen corriente inductiva y potencia reactiva de la red, ya que en estos casos la tensión de la red tiende a disminuir. aumentar, y para mantenerlo en un nivel normal, es necesario cargar la red con corrientes inductivas, que provocan caídas de voltaje adicionales en ella.
Para ello, cada compensador síncrono está equipado con un regulador automático de excitación o tensión, que regula la magnitud de la corriente de excitación para que la tensión en los terminales del compensador permanezca constante.