Características mecánicas de los motores eléctricos y mecanismos de producción.
 Al diseñar un accionamiento eléctrico, el motor eléctrico debe seleccionarse de modo que sus características mecánicas coincidan con las características mecánicas del mecanismo de producción. Las características mecánicas dan la relación de las variables en estado estacionario.
Al diseñar un accionamiento eléctrico, el motor eléctrico debe seleccionarse de modo que sus características mecánicas coincidan con las características mecánicas del mecanismo de producción. Las características mecánicas dan la relación de las variables en estado estacionario.
Una característica mecánica del mecanismo se denomina relación entre la velocidad angular y el momento de resistencia del mecanismo, reducido al eje del motor) ω = f (Mc).
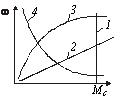
Arroz. 1. Características mecánicas de los mecanismos.
Entre toda la variedad, existen varios tipos característicos de características mecánicas de los mecanismos:
1. Característica con un momento de resistencia independiente de la velocidad (línea recta 1 en la Fig. 1). La característica mecánica independiente de la velocidad se dibuja como una línea recta paralela al eje de rotación, en este caso vertical. Tal característica la poseen, por ejemplo, grúas, cabrestantes, bombas de pistón con altura de entrega constante, etc.
2.Una característica con un momento de resistencia linealmente dependiente de la velocidad (fila 2 en la Fig. 1). Esta dependencia es inherente, por ejemplo, al accionamiento de un generador de CC excitado independientemente que funciona con una carga constante.
3. Característica con un aumento de par no lineal (curva 3 en la Fig. 1). Ejemplos típicos son el funcionamiento de ventiladores, bombas centrífugas, hélices. Para estos mecanismos, el momento Mc depende del cuadrado de la velocidad angular ω... Este es el llamado característica mecánica parabólica (ventilador).
4. Característica con momento de resistencia decreciente no lineal (curva 4 en la Fig. 1). Aquí, el momento de arrastre es inversamente proporcional a la velocidad de rotación. En este caso, la potencia permanece constante en todo el rango de velocidades de funcionamiento del mecanismo. Por ejemplo, en los mecanismos del movimiento principal de algunas máquinas para corte de metales (torneado, fresado, taladrado), el momento Mc cambia inversamente proporcional a ω, y la potencia consumida por el mecanismo permanece constante.
Las características mecánicas del motor eléctrico se denominan dependencia de su velocidad angular del par ωd = f (M). Aquí debe tenerse en cuenta que el momento M en el eje del motor, independientemente de la dirección de rotación, tiene un signo positivo: el momento de movimiento. Al mismo tiempo, el momento de resistencia Mc tiene signo negativo.
Como ejemplos, las Figs. 2 muestra las características mecánicas: 1 — motor síncrono; 2 — Motor CC con excitación independiente; 3 — Motor de CC con excitación en serie.
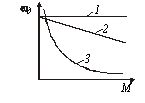 Arroz. 2. Características mecánicas de los motores eléctricos
Arroz. 2. Características mecánicas de los motores eléctricos
Para evaluar las propiedades de las características mecánicas de un accionamiento eléctrico, se utiliza el concepto de rigidez característica.La rigidez de la característica mecánica está determinada por la expresión
β = dM / dω
donde dM — cambio en el par motor; dωd — el cambio correspondiente en la velocidad angular.
Para características lineales el valor β permanece constante, para no lineales depende del punto de operación.
Utilizando este concepto, las características que se muestran en la Fig. 2, puede evaluarse cualitativamente de la siguiente manera: 1 — absolutamente rígido (β = ∞); 2 — sólido; 3 — suave.
Una característica absolutamente difícil: la velocidad de rotación del motor permanece sin cambios cuando la carga del motor cambia de cero a nominal. Los motores síncronos tienen esta característica.
Característica rígida: la velocidad de rotación cambia poco cuando la carga cambia de cero a nominal. Esta característica la posee un motor de corriente continua excitado en paralelo, así como un motor de inducción en la región de la parte lineal de la característica.
Se considera que una característica rígida es aquella en la que el cambio de velocidad no excede aproximadamente el 10% de la velocidad nominal cuando la carga cambia de cero a nominal.
Característica suave: la velocidad del motor cambia significativamente con cambios relativamente pequeños en la carga. Esta característica la posee un motor de corriente continua con excitación en serie, mixta o en paralelo, pero con resistencia adicional en el circuito del inducido, así como asíncrono con resistencia en el circuito del rotor.
Para la mayoría de los mecanismos de producción se utilizan motores asíncronos de jaula de ardilla, que tienen características mecánicas rígidas.
Todas las características mecánicas de los motores eléctricos se dividen en naturales y artificiales.
Las características mecánicas naturales se refieren a las condiciones de funcionamiento del motor con los valores nominales de los parámetros.
Por ejemplo, para un motor excitado en paralelo, la característica natural se puede trazar para el caso en que el voltaje de armadura y la corriente de excitación tengan valores nominales y no haya resistencia adicional en el circuito de armadura.
La característica natural de un motor de inducción corresponde a la tensión nominal y la frecuencia nominal de la corriente alterna suministrada al estator del motor, siempre que no exista resistencia adicional en el circuito del rotor.
Así, para cada motor, solo se puede construir una característica natural y un número ilimitado de artificiales. Por ejemplo, cada nuevo valor de la resistencia de armadura de un motor de CC o en el circuito del rotor de un motor de inducción tiene sus propias características mecánicas.
