Equipo eléctrico de ascensores.
 Un ascensor es una máquina de elevación cíclica diseñada para la elevación vertical de personas y mercancías. Previa cita, los ascensores se dividen en pasajeros, carga-pasajeros, hospital, carga.
Un ascensor es una máquina de elevación cíclica diseñada para la elevación vertical de personas y mercancías. Previa cita, los ascensores se dividen en pasajeros, carga-pasajeros, hospital, carga.
Dependiendo de la velocidad de la cabina, los ascensores se dividen en baja velocidad (hasta 0,71 m/seg), alta velocidad (de 1 a 1,6 m/seg), alta velocidad (de 2 a 4 m/seg) y de alta velocidad (4 — 10 m / s) ... La capacidad de carga de los ascensores de pasajeros es de 320 a 1600 kg, ascensores de carga - de 160-5000 kg. A una velocidad de hasta 1,6 m / seg, el motor eléctrico está conectado a la viga de tracción a través de una caja de cambios, si la velocidad es mayor, se utilizan accionamientos eléctricos sin engranajes.

Con una amplia variedad de opciones de diseño para elevadores de pasajeros y carga, los dispositivos principales para ellos son polipastos, cables, cabinas, contrapesos, frenos mecánicos y equipos de control. Los ascensores modernos tienen un sistema de suspensión de contrapeso y una cuerda de contrapeso.

La cabina se mueve a lo largo de rieles verticales.La cabina está suspendida de las cuerdas que rodean el cable de remolque y guían las poleas del accionamiento del cabrestante eléctrico. En los extremos de la cuerda hay un contrapeso que se desplaza a lo largo de las guías. La masa del contrapeso es igual a la suma de la masa de la cabina y (0,42 — 0,5) la masa de la carga (o la mitad de la carga de la cabina más probable).
Accionamientos de ascensores
En ascensores y montacargas, los tipos de accionamientos eléctricos se seleccionan en función de la velocidad de movimiento, el número de pisos del edificio y la precisión de frenado requerida. Los siguientes accionamientos eléctricos están actualmente en uso:
a) para edificios de hasta 17 pisos, se utilizan ascensores de baja y alta velocidad con una velocidad de 0,7 a 1,4 m/s con una capacidad de carga de 320, 400 kg. Estos ascensores utilizan un accionamiento eléctrico con un motor eléctrico asíncrono de dos velocidades con rotor en jaula de ardilla,
b) para ascensores de pasajeros de alta velocidad con una velocidad de 1,6 m/s, destinados a edificios de hasta 25 pisos, un accionamiento eléctrico según el sistema regulador de voltaje de tiristores (TRN) con un motor asíncrono de dos velocidades (TRN-ADD) se usa

La presencia de un accionamiento eléctrico ajustable garantiza una gran suavidad de los procesos de aceleración y desaceleración, una alta precisión de parada en el suelo (hasta 20 mm) y la ausencia de una sección con velocidad reducida antes de detenerse. El segundo devanado del motor se utiliza para lograr una velocidad baja durante la revisión,
c) para ascensores de alta velocidad y alta velocidad, se utilizan accionamientos eléctricos constantes según el sistema de motor del convertidor de tiristores-TP-D y corriente alterna según el sistema de convertidor de frecuencia-motor eléctrico asíncrono de cortocircuito GGCH-AD.
Accionamiento eléctrico de tiristores del tipo de ascensor ULMP-25-16
El suministro de energía del accionamiento eléctrico (Fig. 1) se realiza mediante un regulador de voltaje de tiristor reversible UZ (TRN) en el arranque y movimiento uniforme y por un rectificador separado ensamblado de acuerdo con un circuito de puente monofásico UZ1 para alimentar el devanado del estator durante el frenado dinámico.
El sistema proporciona control de fase paramétrico de la velocidad de rotación de un motor de inducción de jaula de ardilla. El sistema de control automático se realiza en una microcomputadora de un solo chip del tipo KR1816VB031, que realiza un control digital directo de la velocidad de rotación de un motor eléctrico asíncrono de dos velocidades.
El sistema de control automático garantiza una alta precisión de mantener la velocidad establecida y detenerse en el nivel del piso requerido directamente al punto establecido sin una sección con velocidad reducida. El segundo devanado del motor se enciende solo durante la revisión.
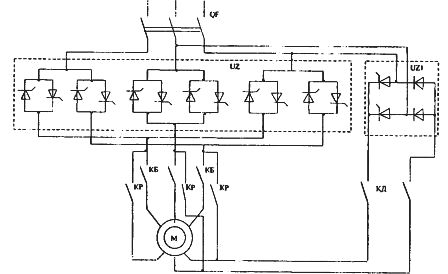
Arroz. 1. Esquema del tiristor de accionamiento eléctrico del ascensor.
Solenoide de freno
Los mecanismos de elevación de los ascensores están equipados con dispositivos especiales de frenado con electroimanes de corriente continua de carrera corta y carrera corta, que se conectan a una red de 220 o 380 V a través de un rectificador.
Dispositivos de control de ascensores
Interruptores de piso diseñados para conmutar circuitos de control de movimiento. Registran la posición del coche, seleccionan automáticamente la dirección de movimiento («arriba» o «abajo») y dan una orden para apagar el accionamiento eléctrico al frenar.Estructuralmente, estos son interruptores de palanca de tres puntos (1-0-2) de tres posiciones (dispositivos de control de movimiento) que tienen contactos móviles (en la palanca) a fijos (en el cuerpo).
Los interruptores de piso están montados en el eje al nivel del piso y hay una rama moldeada en la cabina que actúa sobre la palanca del interruptor de piso.
Cuando la cabina se mueve "hacia arriba" girando la palanca, se cierra un grupo de contactos fijos y "abajo" - otro. Cuando la cabina está al nivel del piso, el interruptor de piso está en la posición neutra «O» y los contactos fijos están abiertos.

Los interruptores de velocidad están diseñados para dar un impulso para reducir la velocidad antes de detener el vehículo. Se utilizan en ascensores de alta velocidad con accionamiento eléctrico con ejecución de dos velocidades. Están construidos según el principio de los interruptores de piso, pero tienen un diseño diferente. Los interruptores de velocidad se instalan en el pozo de la mina como un conjunto completo por encima y por debajo del suelo a una distancia de 0,5 a 0,6 m.
Los interruptores de palanca están diseñados para operar montacargas controlados. Estructuralmente, estos son interruptores de palanca de tres posiciones con autorretorno del mango a la posición neutral ("arriba" -0- "abajo"), montados en la cabina. Al girar la manija, se selecciona la dirección del movimiento, que se logra cerrando un par de contactos fijos. Cuando se suelta la manija, los contactos se abren y el motor se detiene (se apaga). Los interruptores se utilizan simultáneamente como interruptor de fin de carrera en las posiciones finales de la cabina. Esto se logra por la acción de la palanca sobre el rodillo de guías especiales en el pozo de la mina.
Sensores inductivos diseñados para su uso en ascensores de alta velocidad. El diagrama de tales sensores para corriente alterna y rectificada se muestra en la Fig. 2.
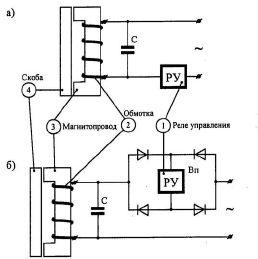
Arroz. 2. Diagrama esquemático de sensores inductivos de corriente alterna (a) y rectificada (b)
Se instala un circuito magnético laminado en forma de U hecho de acero 3 en el pozo de la mina, y hay un soporte de acero 4 en la cabina, que es una derivación magnética. En el circuito magnético hay una bobina con devanado 2, a la que se conecta el relé de control 1 directamente oa través de un rectificador Vp. Cuando la pinza sale (se abre el circuito magnético), la resistencia inductiva de la bobina es pequeña, lo que garantizará el funcionamiento del relé de control. Si el soporte de acero se superpone al circuito magnético, la resistencia inductiva de la bobina aumenta bruscamente y el relé se libera.
La confiabilidad y claridad de operación del relé de control están aseguradas por la inclusión de la capacitancia C en paralelo con la bobina, que se selecciona a partir de la condición de obtener un modo cercano a la resonancia de las corrientes. El uso de un rectificador para alimentar el relé de control aumenta la fiabilidad del funcionamiento del sistema magnético del relé.
Además, los dispositivos de contacto herméticos (interruptores de láminas) se utilizan ampliamente en los sensores de viaje. El uso de sensores inductivos elimina las desventajas de los interruptores de piso y los interruptores de velocidad como el ruido y la interferencia de radio que surgen del funcionamiento de los dispositivos de contacto.
La estratificación magnética es un dispositivo electromagnético instalado en la cabina y que controla el funcionamiento de las cerraduras de las puertas de la mina. El limitador de rama magnética está conectado a la armadura del electroimán de rama.Cuando la cabina está en el piso, el electroimán de derivación se desairea, el retén accionado por resorte desengancha el pestillo de la cerradura de la puerta de la mina y permite que se abra.
Al moverse, el electroimán de la rama se energiza: se introduce el pestillo que impide abrir la puerta. Tales cerraduras se utilizan en ascensores de diseño antiguo (o modernizados) con operación manual de puerta de pozo.

Automatización de ascensores
La principal diferencia entre el funcionamiento de ascensores y montacargas es su posición multiposición, lo que se expresa en el hecho de que los mecanismos pueden ocupar una gran cantidad de posiciones fijas. Por lo tanto, después de cada parada es necesario resolver el problema lógico de elegir el siguiente movimiento. La solución a este problema se implementa actualmente mediante chips lógicos y microprocesadores. Se establecen las siguientes tareas para el esquema de control del ascensor: control de la posición de la cabina en el hueco, selección automática de la dirección de movimiento, determinación del tiempo de inicio de la parada, parada precisa de la cabina en el piso, apertura automática y cierre de puertas y protección de accionamientos eléctricos y ascensor.
Las señales de comando que establecen el programa de movimiento del automóvil se dividen en dos tipos: "órdenes" provenientes del automóvil y "llamadas" provenientes de la plataforma de aterrizaje. Los comandos se dan a través de botones ubicados en las áreas de la cabina y el piso, respectivamente. Dependiendo de la respuesta a los comandos y los métodos de su procesamiento, los esquemas de control separados y colectivos difieren.Con un principio de control separado, el circuito percibe y ejecuta solo un comando y durante su ejecución no responde a otros pedidos y llamadas.
Este esquema es el más simple de implementar, pero limita las posibles características del ascensor y, por lo tanto, solo se usa para ascensores en edificios residenciales de hasta nueve pisos de altura con un flujo de pasajeros relativamente pequeño. Con el principio de control colectivo, el circuito recibe varios comandos simultáneamente y los ejecuta en una secuencia determinada, generalmente en el orden de los pisos.

La base del sistema de control de ascensores es la medición del reloj de piso. El estudio del reloj puede ser de péndulo, cuando la fijación se realiza en dos direcciones, de abajo hacia arriba y de arriba hacia abajo, y en una dirección, por ejemplo, sólo de arriba hacia abajo. El columpio del péndulo se usa con más frecuencia.