Control remoto en redes eléctricas
 Estructuralmente, las redes eléctricas a escala regional o regional consisten en una gran cantidad de objetos interconectados:
Estructuralmente, las redes eléctricas a escala regional o regional consisten en una gran cantidad de objetos interconectados:
-
subestaciones ubicadas cerca de áreas pobladas;
-
líneas de transmisión de energía;
-
puntos de producción y consumo de energía eléctrica.
El control de los procesos tecnológicos que tienen lugar entre ellos se lleva a cabo mediante centros de despacho que son responsables de un gran número de subestaciones remotas que operan en modo automático. Sin embargo, debido a la importancia de las tareas realizadas, deben ser monitoreadas constantemente y, si es necesario, controladas por el despachador. Estas funciones son realizadas por dos sistemas de control remoto: control remoto TU y señalización remota del vehículo.
El principio de funcionamiento del mando a distancia.
En el tablero de distribución de cada subestación hay interruptores de alimentación que conmutan la electricidad entrante y saliente a través de las líneas eléctricas.El estado del interruptor se repite por sus contactos de bloque secundarios, y por ellos los relés intermedios y los relés de bloqueo, cuya posición se utiliza en el circuito telemecánico de señales. Funcionan como sensores y, al igual que los dispositivos de conmutación, tienen dos significados: "encendido" y "apagado".
El principio de funcionamiento de la telemecánica.
Cada subestación cuenta con un sistema de señalización local que informa personal electricorealizar trabajos en el equipo sobre el estado del circuito eléctrico al encender los paneles de luz y emitir señales de sonido. Pero durante más tiempo, la subestación funciona sin personas y, para informar al despachador de turno sobre la situación operativa, se utiliza un sistema de teleseñales.
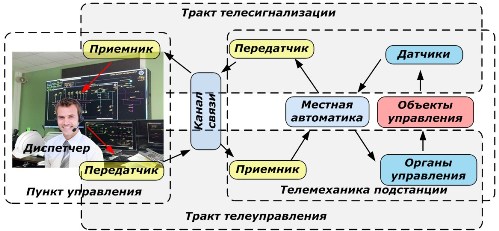
A la posición del interruptor se le asigna uno de los valores de código binario «1» o «0», que es enviado por el automatismo local al transmisor conectado a canal de comunicación (cable, teléfono, radio).
En el lado opuesto del canal de comunicación hay un punto de control y un receptor de la instalación eléctrica, que procesa las señales recibidas del transmisor y las convierte en una forma accesible de información para el despachador. Según ellos, se está evaluando el estado de la subestación.
Sin embargo, en muchos casos estos datos son insuficientes. Por lo tanto, la teleseñalización se complementa con el sistema de telemetría TI, según el cual las lecturas de los medidores de potencia, voltaje y corriente principales también se transmiten al panel de control. Por su estructura, el circuito TI está incluido en el kit de telemecánica.
El despachador tiene la capacidad de influir en la distribución de energía eléctrica desde una subestación remota por medio de control remoto... Para ello, dispone de su propio transmisor que da órdenes al canal de comunicación desde el punto de control. En el extremo opuesto de la ruta de transmisión, el receptor recibe el comando y lo transmite a la automatización local para que actúe sobre los controles que activan el interruptor de encendido.
Los sistemas telemecánicos son atendidos por la SDTU y el Servicio de Comunicaciones, y el servicio de automatización local por el SRZA.
Tipos de comandos de control remoto
La señal emitida por el transmisor del despachador al cuerpo de control de la subestación se considera un comando que requiere ejecución obligatoria.
El pedido solo puede ser enviado a:
-
objeto separado de la subestación (interruptor);
-
un grupo de dispositivos en diferentes subestaciones, por ejemplo, un comando telemecánico para establecer información para proporcionar cierta información.
Características del uso del control remoto.
Los requisitos de aprovisionamiento se imponen a las tareas realizadas por el despachador desde el punto de conmutación remoto:
-
aumentar la confiabilidad del suministro de energía a los consumidores acelerando rápidamente las acciones;
-
manteniendo los criterios de seguridad en el uso de la electricidad.
Antes de encender la conexión por control remoto, el despachador tiene en cuenta que el interruptor automático de la subestación remota se puede apagar:
-
por la acción de protecciones para evitar el desarrollo de un accidente después del encendido de prueba por reenganche automático (reenganche);
-
personal operativo autorizado a trabajar en la subestación desde un punto local o remoto.
En todos los casos, antes de encender el circuito, se deben seguir las reglas de seguridad y se debe obtener información confiable recopilada por un electricista capacitado sobre la preparación del circuito para encender la carga.
A veces, los trabajadores individuales, para acelerar la búsqueda de un cortocircuito que ocurrió en conexiones remotas de 6 ÷ 10 kV, "cometen un error" al encender el interruptor automático bajo carga después de desconectar parte de ciertos consumidores. En este método, en caso de que no se determine la ubicación de la falla, se produce nuevamente un cortocircuito en el circuito, acompañado de mayores cargas del equipo, flujos de energía y otras desviaciones del modo normal.

Interacción de telecontrol y teleseñalización
El comando de control remoto es transmitido por el despachador en dos etapas: preparatoria y ejecutiva. Esto elimina los errores que pueden ocurrir al ingresar una dirección y una acción. Antes del envío final del comando al iniciar el transmisor, el operador tiene la oportunidad de verificar los datos ingresados por él.
Cada acción del comando TU corresponde a una determinada posición de los órganos ejecutivos del objeto remoto, que debe ser confirmada por señalización remota y aceptada por el despachador. La señal del vehículo se retransmitirá hasta que se reconozca en el punto de recepción.
Reconocimiento en telemecánica: la operación realizada, el operador observa las señales para confirmar la recepción de la señal y la bloquea en el diagrama mnemotécnico.La señal que reaparece en el diagrama mnemotécnico atrae la atención del operador para cambiar el estado del objeto controlado (por ejemplo, al hacer parpadear una luz de advertencia) y la discrepancia en la posición del dispositivo de advertencia (símbolo) estado del objeto. Como resultado de la confirmación, el dispositivo de señalización debe asumir una posición correspondiente al nuevo estado del objeto controlado.
Hay dos métodos de confirmación: individual, con el uso de teclas de protocolo de enlace separadas y general, con una común para todas las señales con el botón de confirmación. En el último caso, el esquema de acuse de recibo se implementa mediante un conjunto de relés de protocolo de enlace individuales. En el esquema del dispositivo de señalización, los contactos de las teclas de confirmación o relés están conectados según el principio de no correspondencia con los contactos de los relés de señal que repiten el estado de los objetos monitoreados.
En algunos casos, el comando TR puede no ejecutarse por varias razones. El sistema de control remoto no tiene que "recordarlo" y duplicarlo nuevamente. Todas las manipulaciones adicionales se llevan a cabo después de establecer las causas del daño y verificar el estado del objeto de control.
El estado técnico del canal de comunicación debe ser monitoreado constantemente por el equipo. El mensaje transmitido a través del vehículo por el transmisor debe recibirse sin distorsión. Las interferencias que se produzcan en el canal de comunicación no deberían reducir la fiabilidad de la información.

Confiabilidad de la información
Todos los mensajes de teleseñalización transmitidos quedan almacenados en la memoria del equipo hasta la confirmación de su recepción en el centro de control.Si el canal de comunicación está roto, se transmitirán automáticamente después de que se restablezca.
Al transmitir un comando TC a una subestación remota, a veces puede surgir una situación en la que se hayan producido cambios en el entorno operativo y recibir el comando provocará acciones no deseadas en el equipo o perderá sentido. Por lo tanto, para tales casos, la acción prioritaria de los mensajes TS se ingresa en el algoritmo de automatización para tales casos antes que los comandos TC.
El equipo de telemecánica puede usar o usar dispositivos analógicos heredados tecnologías digitales… En la segunda versión, las capacidades del equipo se amplían significativamente, mientras que se aumenta la protección contra el ruido del canal de comunicación.