Qué es la mecatrónica, elementos mecatrónicos, módulos, máquinas y sistemas
La palabra "mecatrónica" se forma a partir de dos palabras: "mecánica" y "electrónica". Este término fue propuesto en 1969 por un desarrollador senior de Yaskawa Electric, un japonés llamado Tetsuro Mori. En el siglo XX, Yaskawa Electric se especializó en el desarrollo y la mejora de accionamientos eléctricos y motores de CC y, por lo tanto, logró un gran éxito en esta dirección, por ejemplo, allí se desarrolló el primer motor de CC con armadura de disco.
A esto le siguieron desarrollos relacionados con los primeros sistemas CNC de hardware. Y en 1972 se registró aquí la marca Mechatronics. La empresa pronto hizo grandes avances en el desarrollo de tecnologías de propulsión eléctrica. Posteriormente, la empresa decidió eliminar la palabra "Mecatrónica" como marca comercial, ya que el término se usaba ampliamente tanto en Japón como en todo el mundo.

En cualquier caso, Japón alberga el desarrollo más activo de este enfoque tecnológico, cuando se hizo necesario combinar elementos mecánicos, máquinas eléctricas, electrónica de potencia, microprocesadores y software para implementar un control de accionamiento eléctrico de alta precisión.
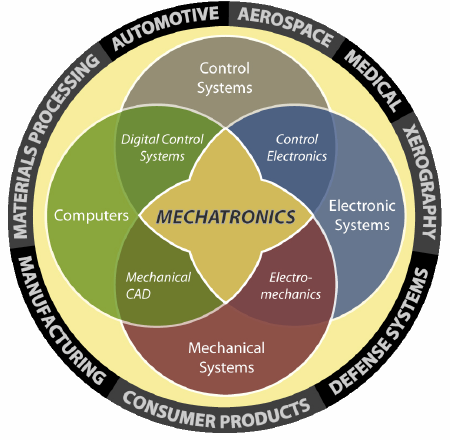
Un símbolo gráfico común para la mecatrónica es un diagrama del sitio web del RPI (Rensselaer Polytechnic Institute, NY, EE. UU.):
La mecatrónica es uno de los campos de ingeniería más nuevos del mundo, que, según la UNESCO, es uno de los diez más prometedores y buscados.
En términos generales, al término "mecatrónica" se le puede dar la siguiente definición: es un campo de la ciencia y la tecnología basado en una combinación sistemática de unidades para mecánica de precisión, ingeniería eléctrica, electrónica, tecnología de microprocesadores, diversas fuentes de energía, electricidad, hidráulica y accionamientos neumáticos, así como su control inteligente, enfocados a la creación y operación de bloques de modernos sistemas de producción automatizados.
La mecatrónica es el control de movimiento computarizado.
El objetivo de la mecatrónica es crear módulos de movimiento cualitativamente nuevos, módulos de movimiento mecatrónicos, módulos mecatrónicos inteligentes y, sobre esta base, mover máquinas y sistemas inteligentes.
Históricamente, la mecatrónica evolucionó a partir de la electromecánica y, basándose en sus logros, fue más allá al combinar sistemáticamente sistemas electromecánicos con dispositivos de control por computadora, sensores integrados e interfaces.

Diagrama del sistema mecatrónico
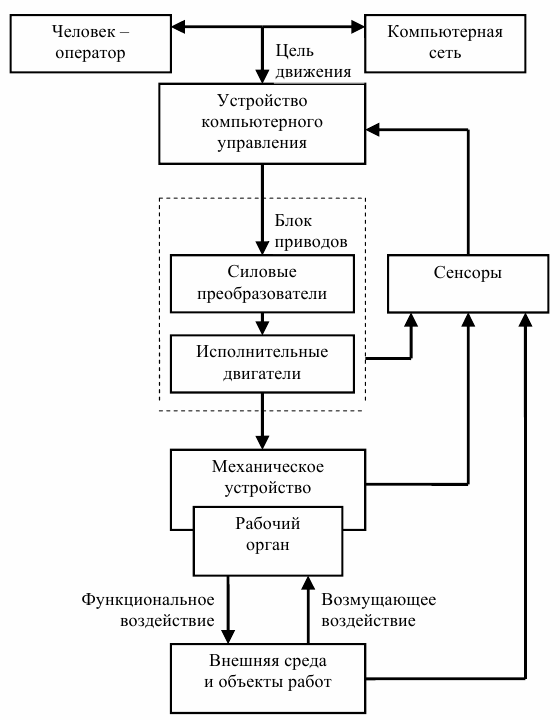
Estructura generalizada de los sistemas mecatrónicos.
Los elementos electrónicos, digitales, mecánicos, eléctricos, hidráulicos, neumáticos y de información pueden formar parte del sistema mecatrónico, como elementos inicialmente de una naturaleza física diferente, sin embargo, se unen para obtener un resultado cualitativamente nuevo del sistema, que no se puede lograr. por cada elemento como por un ejecutante separado.

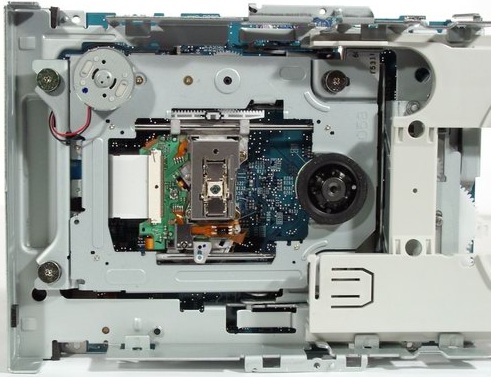
Un motor de husillo separado no podrá expulsar la bandeja del reproductor de DVD por sí solo, pero bajo el control de un circuito con software de microcontrolador y correctamente conectado a un engranaje helicoidal, todo funcionará fácilmente y parecerá un sistema monolítico simple. Sin embargo, a pesar de la simplicidad externa, un sistema mecatrónico por definición incluye varias unidades y módulos mecatrónicos interconectados e interactuando entre sí para realizar acciones funcionales específicas para resolver una tarea específica.
Un módulo mecatrónico es un producto independiente (estructural y funcionalmente) diseñado para realizar movimientos con interpenetración e integración simultánea de hardware y software de sus componentes.
Un sistema mecatrónico típico consta de componentes electromecánicos y de potencia interconectados que, a su vez, están controlados por una computadora o microcontroladores.
Al diseñar y construir un sistema mecatrónico de este tipo, intentan evitar nodos e interfaces innecesarios, intentan que todo sea conciso y lo más fluido posible, no solo para mejorar las características de tamaño de masa del dispositivo, sino también para aumentar la confiabilidad. del sistema en general.
A veces no es fácil para los ingenieros, se ven obligados a encontrar soluciones muy inusuales precisamente por el hecho de que diferentes unidades se encuentran en diferentes condiciones de trabajo, haciendo cosas completamente diferentes. Por ejemplo, en algunos lugares un cojinete convencional no funcionará, y se reemplaza por una suspensión electromagnética (esto se hace, en particular, en turbinas que bombean gas a través de tuberías, ya que un cojinete convencional fallaría rápidamente debido a la penetración de gas en su lubricante).
De una forma u otra, hoy en día la mecatrónica ha permeado todo, desde los electrodomésticos hasta la robótica de la construcción, las armas y la industria aeroespacial. Todas las máquinas CNC, discos duros, cerraduras eléctricas, el sistema ABS de su coche, etc. — en todas partes, la mecatrónica no solo es útil, sino también necesaria. Ahora es raro encontrar un control manual, todo se reduce al hecho de que presionó el botón sin fijarlo o simplemente tocó el sensor; obtuvo el resultado; este es quizás el ejemplo más primitivo de lo que es la mecatrónica en la actualidad.
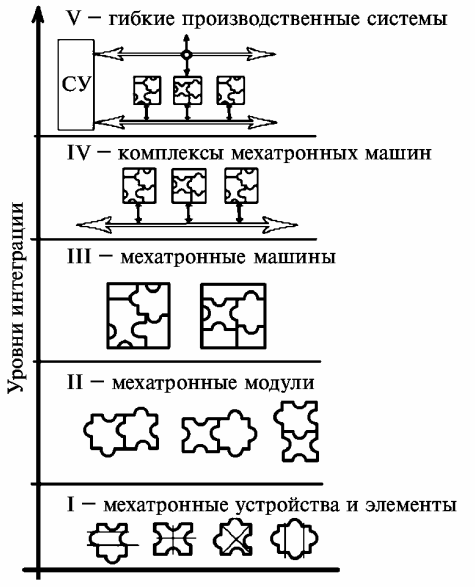
Diagrama de jerarquía de los niveles de integración en mecatrónica
El primer nivel de integración lo forman los dispositivos mecatrónicos y sus elementos. El segundo nivel de integración lo forman los módulos mecatrónicos integrados. El tercer nivel de integración lo forman las máquinas mecatrónicas de integración. El cuarto nivel de integración está formado por los complejos de máquinas mecatrónicas. El quinto nivel de integración se forma sobre una única plataforma de integración de complejos de máquinas mecatrónicas y robots, que implican la formación de sistemas de producción flexibles reconfigurables.
Hoy en día, los módulos y sistemas mecatrónicos se utilizan ampliamente en las siguientes áreas:
-
equipos de ingeniería mecánica y automatización, procesos tecnológicos en ingeniería mecánica;
-
robótica industrial y especial;
-
tecnología aeronáutica y espacial;
-
equipo militar, vehículos para la policía y servicios especiales;
-
equipos de ingeniería electrónica y creación rápida de prototipos;
-
industria automotriz (módulos de tracción de ruedas motrices, frenos antibloqueo, transmisiones automáticas, sistemas de estacionamiento automático);
-
vehículos no tradicionales (coches eléctricos, bicicletas eléctricas, sillas de ruedas);
-
equipos de oficina (por ejemplo, fotocopiadoras y máquinas de fax);
-
periféricos informáticos (por ejemplo, impresoras, trazadores, unidades de CD-ROM);
-
equipamiento médico y deportivo (prótesis bioeléctricas y de exoesqueleto para discapacitados, entrenadores de tonificación, cápsulas de diagnóstico controlado, masajeadores, etc.);
-
electrodomésticos (lavado, costura, lavavajillas, aspiradoras independientes);
-
micromáquinas (para medicina, biotecnología, comunicaciones y telecomunicaciones);
-
aparatos y máquinas de control y medición;
-
equipos de ascensores y almacenes, puertas automáticas en hoteles y aeropuertos; equipos de fotografía y video (reproductores de videodiscos, dispositivos de enfoque de cámaras de video);
-
simuladores para entrenar operadores de sistemas técnicos complejos y pilotos;
-
transporte ferroviario (sistemas de control y estabilización de trenes);
-
máquinas inteligentes para la industria alimentaria, cárnica y láctea;
-
máquinas de impresión;
-
dispositivos inteligentes para la industria del espectáculo, atracciones.
En consecuencia, la necesidad de personal con tecnologías mecatrónicas es cada vez mayor.