Control de nivel de agua del tanque mediante relé programable OWEN PR110
El controlador PR110 es producido por la empresa rusa «OWEN». El controlador realiza operaciones solo con señales discretas; su objetivo principal es reemplazar los sistemas de control simples basados en la lógica de relés. Esto determina el hecho de que a él (así como a otros controladores con funciones similares) se le asigne el nombre de «relé programable».

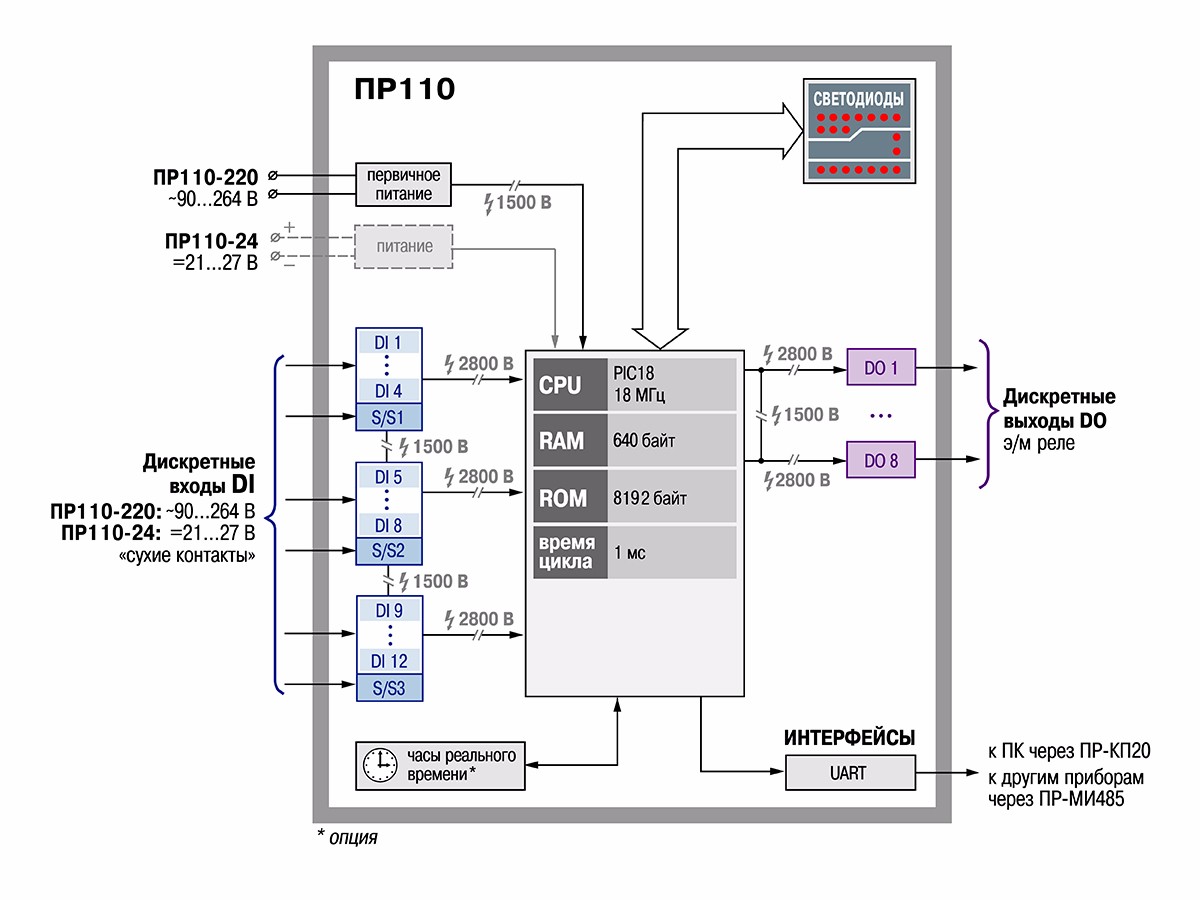
Diagrama funcional del relé programable ARIES PR110:
La principal y única herramienta para programar y depurar el software del controlador es una computadora personal. Con su ayuda, no solo puede crear el software del controlador correspondiente, sino que, por regla general, también puede observar cómo funciona mediante simulación por computadora.

Veremos el proceso de creación de un programa de control de conmutación para relés programables PR110 usando el ejemplo de un sistema de control de nivel de agua en un tanque.
Condiciones técnicas
Es necesario implementar un sistema de control para llenar el tanque con agua. El desempeño de ciertas funciones está determinado por el estado de los sensores de nivel, algunas funciones por el operador. Debería haber una indicación luminosa del estado actual del sistema.
El algoritmo de control es el siguiente. Hay tres sensores que determinan el nivel actual del agua en el tanque: superior, medio e inferior. Cada sensor se activa (produce un nivel de unidad lógica en la salida) cuando el agua supera el nivel correspondiente.
El control manual se realiza mediante dos botones: «Start» y «Stop». Cuando el tanque está vacío (el nivel del agua está por debajo de los sensores de nivel inferior), la luz indicadora roja debe estar fija, cuando está lleno (por encima del nivel superior), debe estar verde fija. Se controlan dos bombas.
Las bombas se pueden encender si el tanque no está lleno (el nivel del agua está por debajo de la parte superior). Si al presionar el botón «Inicio» el nivel del agua está por debajo del promedio, se inician ambas bombas, si al presionar el botón «Inicio» el nivel del agua está por encima del promedio, se inicia una bomba.
El encendido de las bombas va acompañado de un indicador verde parpadeante. Cuando el tanque está lleno (el nivel del agua alcanza el nivel superior), las bombas se apagan automáticamente. Si el depósito está vacío (el nivel del agua está por debajo del nivel inferior), no es posible apagar las bombas pulsando el botón «Stop».
Un ejemplo de creación de un programa en OWEN Logic
Para realizar esta tarea, la máquina de control debe tener cinco entradas discretas y cuatro salidas de relé. Para resolver este problema, tomaremos las siguientes decisiones.
Conecte el sensor de nivel de agua del tanque inferior a la entrada I1, el sensor de nivel medio a la entrada I2 y el sensor de nivel superior a la entrada I3.Conecte el botón Stop a la entrada I4 y el botón Start a la entrada I5. Controlaremos la inclusión de la bomba No. 1 con la ayuda de la salida Q1, la inclusión de la bomba No. 2 con la ayuda de la salida Q2. Conecte el indicador rojo a la salida Q3, el indicador verde a la salida Q4.
El control manual se realiza mediante botones que generan señales de control de corta duración. Para que el sistema de control permanezca en un estado en el que lo transferiremos con una señal a corto plazo de uno u otro botón, se necesita un disparador en el programa.
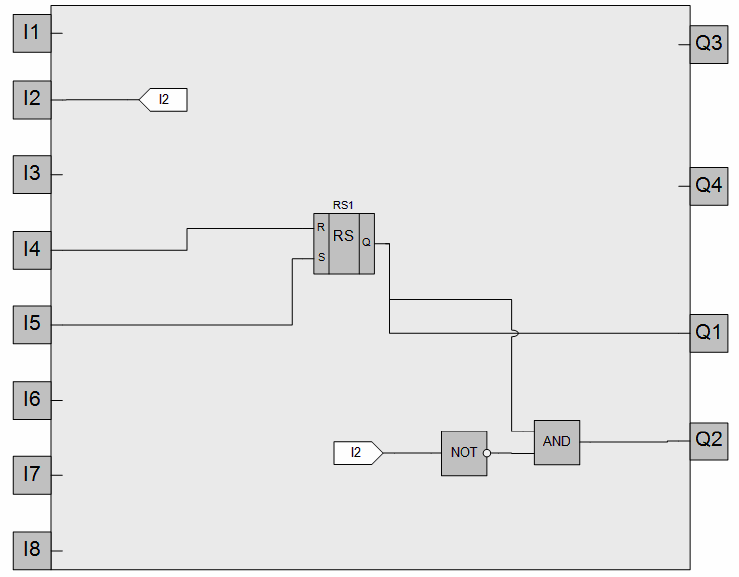
Introduzcamos el flip-flop RS1 en el programa. La salida de este flip-flop se establece en uno cuando llega un flanco positivo a la entrada S y se restablece a cero cuando llega un flanco positivo a la entrada R. Cabe señalar que cuando el uno las señales llegan a las entradas, la señal de entrada R tiene prioridad.
Si el nivel de agua en el tanque es más alto que el anterior o hemos presionado y mantenido presionado el botón "Stop" en este estado, entonces presionar el botón "Start" en ese momento no debería encender las bombas. Por tanto, el botón «Start» se conecta a la entrada S con menor prioridad del flip-flop RS1. Entonces, si ninguna condición impide que la bomba se encienda (es decir, habrá un cero lógico en la entrada R del gatillo RS1), cuando se presione el botón «Inicio», la salida del gatillo RS1 se establecerá en uno. Esta señal se utilizará para activar los motores.
De las dos bombas, la bomba n.º 1 debe estar encendida en cualquier caso, por lo que la señal de la salida del disparador RS1 se conecta a la salida Q1. La bomba #2 solo debe encenderse si el sensor de nivel medio no está disparado. Para cumplir esta condición, introducimos el inversor y el elemento lógico AND en el programa.La entrada del inversor está conectada a la entrada I2, las entradas del elemento lógico Y a la salida del inversor ya la salida del disparador RS1, respectivamente.
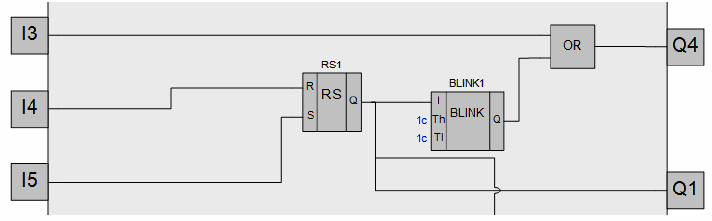
El encendido de las bombas debe ir acompañado de un indicador verde parpadeante. Para generar una señal periódica para encender/apagar el indicador verde, introducimos el generador de onda cuadrada BLINK1 en el programa. En la pestaña de propiedades de este bloque, establezca la duración de las señales uno y cero en su salida para que sea igual a 1 s. Conectar la salida del disparador RS1 a la entrada de activación del funcionamiento del generador BLINK1.
Ahora el generador BLINK1 solo funcionará cuando la salida del disparador RS1 esté configurada en uno, es decir. cuando se activan las bombas. 26 Introduzcamos la puerta OR en el programa. Conectamos su salida a la salida de Q4. Conectamos una entrada de la puerta OR a la salida del generador BLINK1, la otra a la entrada I3. Ahora, cuando las bombas estén encendidas, el indicador verde parpadeará, pero si se activa el sensor de nivel superior, este indicador estará encendido continuamente.
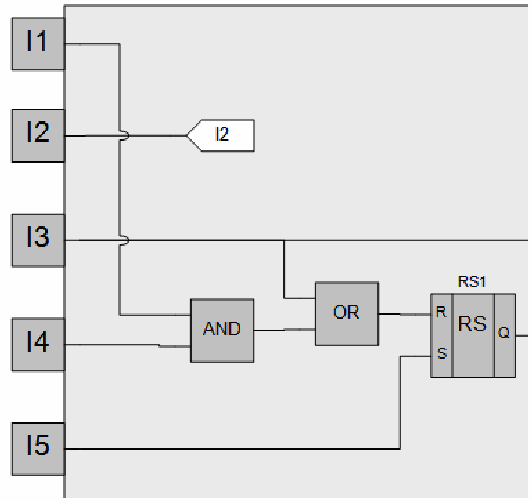
Las bombas deben apagarse si pulsamos el botón "Stop" y al mismo tiempo el sensor de nivel inferior estará en estado de unidad lógica (presencia con al menos un mínimo de agua en el depósito) o si se activa el sensor de nivel superior ( el tanque está lleno).
Para cumplir estas condiciones, introducimos en el programa el elemento lógico O y el elemento lógico I. Conectamos una entrada del elemento lógico Y al botón "Stop", la otra a la entrada I1 (con la salida del nivel inferior sensor). Conectamos una entrada del elemento OR a la salida del elemento AND, la otra a la entrada I3 (con la salida del sensor de nivel superior). La salida del elemento OR está conectada a la entrada R del flip-flop RS1.
El indicador rojo debe encenderse si se cumplen dos condiciones al mismo tiempo: las bombas no funcionan (cero está presente en la salida del gatillo RS1) y el nivel del agua está por debajo del nivel inferior (hay cero en la salida de el sensor de nivel inferior).
Para "verificar" estas condiciones y controlar el indicador rojo en el programa, introducimos dos inversores y un elemento lógico I. La entrada de un inversor está conectada a la entrada I1 (con la salida del sensor de nivel inferior), la entrada de el otro inversor - con la salida de disparo RS1). Conectamos las salidas de los inversores a las entradas de la puerta AND. La salida de la puerta AND está conectada a la salida de Q3.

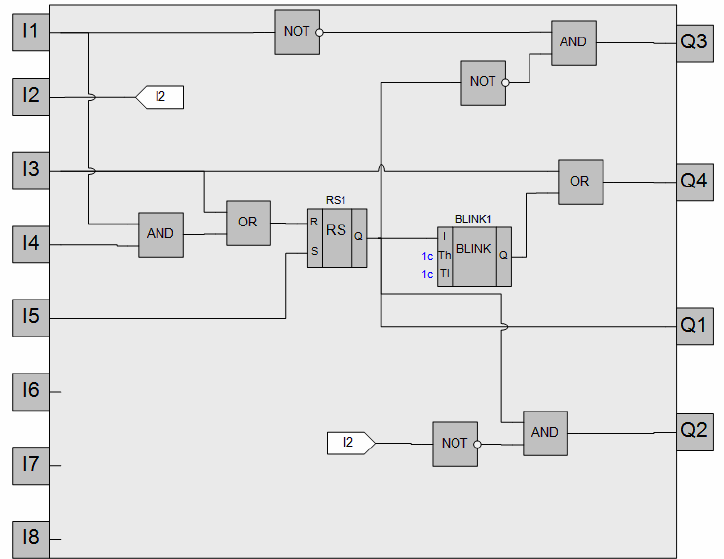
Al final, en general, debe tener el programa que se presenta a continuación. La figura muestra tentativamente circuitos externos conectados a un relé programable.
Utilizando el modo de emulación del entorno de programación OWEN Logic, asegúrese de que el programa funcione de acuerdo con la tarea original. Después de cargar el programa en el relé, asegúrese de lo mismo.