Sensores de parámetros tecnológicos: fuerza, presión, par
Para la implementación de un control automatizado y de alta precisión de los procesos tecnológicos, siempre es necesario tener a su disposición información sobre los valores actuales de los parámetros tecnológicos clave. Por lo general, se utilizan varios sensores para este propósito: fuerzas, presión, par, etc. Veamos tres tipos de sensores, comprendamos el principio de su funcionamiento.

En primer lugar, observamos que en la construcción de sensores de fuerza o par, se utilizan elementos sensibles, cuyas propiedades cambian de acuerdo con el grado actual de deformación resultante de una u otra influencia externa.
Estos pueden ser placas metálicas elásticas, resortes o ejes, cuya deformación se transmite a un elemento magnetoestrictivo, piezoeléctrico o semiconductor, cuyos parámetros eléctricos o magnéticos dependerán directamente del grado de deformación. Bastará medir este parámetro para tener una idea del tamaño de la deformación y, en consecuencia, de la fuerza (presión, par).
Galgas extensométricas tensométricas

La galga extensiométrica más sencilla basada en Convertidor de cable de galgas extensométricas incluye un elemento elástico mecánico que se somete a deformación y una galga extensiométrica adjunta, cuya deformación se convierte directamente en una señal eléctrica.
Un alambre delgado (con un diámetro de 15 a 60 micras) de nicromo, constantan o ellinvar, que se dobla con una serpiente y se fija en un soporte de película, actúa como un sensor de galgas extensométricas. Tal transductor se pega a la superficie cuya deformación se va a medir.
La deformación del elemento elástico mecánico conduce al estiramiento o compresión del cable a lo largo de su longitud, mientras que su sección transversal disminuye o aumenta, lo que afecta el cambio en la resistencia del convertidor a la corriente eléctrica.
Al medir esta resistencia (caída de voltaje a través de ella), tenemos una idea de la magnitud de la deformación mecánica y, en consecuencia, la fuerza, siempre que se conozcan los parámetros mecánicos del elemento deformado.
Sensores de torque del manómetro

Para medir el momento de la fuerza, se utilizan elementos elásticos sensibles en forma de resortes o ejes delgados, que se tuercen durante el proceso tecnológico. La deformación angular elástica, es decir, el ángulo relativo del principio y el final del resorte, se mide y convierte en una señal eléctrica.
El elemento elástico suele estar encerrado en un tubo, uno de cuyos extremos está fijo y el otro está conectado a un sensor de desplazamiento angular que mide el ángulo de divergencia entre los extremos del tubo y el elemento deformable.
Así, se obtiene una señal que lleva información sobre la magnitud del par.Para eliminar la señal del resorte, los cables del elemento de resistencia de tensión se conectan mediante anillos deslizantes a las escobillas.
Sensores de fuerza magnetoestrictiva
También existen sensores de fuerza con transductores magnetostrictivos extensométricos. Usado aquí el fenómeno de magnetoestricción inversa (efecto Villari), que consiste en que cuando se aplica presión a un núcleo hecho de una aleación de hierro-níquel (como el permaloide), su permeabilidad magnética cambia.
La compresión longitudinal del núcleo conduce a la expansión. sus bucles de histéresis, la inclinación del bucle disminuye, lo que conduce a una disminución en el valor de la permeabilidad magnética, respectivamente, a una disminución en la inductancia o inductancia mutua de los devanados del sensor.
Dado que las características magnéticas no son lineales y también debido a que se ven significativamente afectadas por la temperatura, se hace necesario utilizar un circuito de compensación.
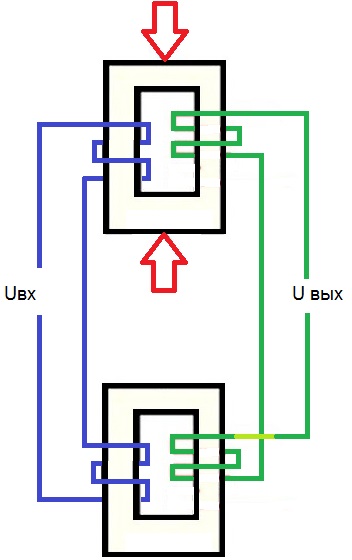
El siguiente régimen general se aplica a las indemnizaciones. Un núcleo magnético magnetoestrictivo cerrado hecho de ferrita de níquel-zinc está sujeto a una fuerza medible. Dicho núcleo no experimenta presión de fuerza, pero los devanados de los dos cables están conectados entre sí, por lo que se produce un cambio en la FEM total.
Los devanados primarios son idénticos y están conectados en serie, son alimentados por corriente alterna con una frecuencia dentro de los diez kilohercios, mientras que los devanados secundarios (también iguales) se encienden en sentido opuesto, y en ausencia de una fuerza deformante, la FEM total es 0. Si la presión en el primer núcleo aumentó, el EMF total en la salida no es cero y es proporcional a la deformación.