Determinación de la potencia del motor en funcionamiento continuo
 El modo de funcionamiento del accionamiento eléctrico con tal duración, en el que la temperatura del motor eléctrico alcanza un valor estacionario, se denomina a largo plazo. En este caso, la potencia nominal del motor eléctrico debe ser igual a la potencia requerida para operar la máquina. Si en el catálogo no existe ningún motor eléctrico de esta potencia nominal, se selecciona el motor de mayor potencia más próximo.
El modo de funcionamiento del accionamiento eléctrico con tal duración, en el que la temperatura del motor eléctrico alcanza un valor estacionario, se denomina a largo plazo. En este caso, la potencia nominal del motor eléctrico debe ser igual a la potencia requerida para operar la máquina. Si en el catálogo no existe ningún motor eléctrico de esta potencia nominal, se selecciona el motor de mayor potencia más próximo.
Si para un proceso tecnológico dado se conocen la fuerza de corte F en N y la velocidad de corte v en m / min, entonces la potencia de corte en kW se puede determinar mediante la fórmula:

Para determinar la potencia de eje correspondiente del motor eléctrico de accionamiento, es necesario tener en cuenta las pérdidas en las transmisiones mecánicas de la máquina y para ello es necesario conocer la eficiencia de la máquina ηc; entonces:

Las pérdidas de potencia durante el arranque del motor (en promedio) superan las pérdidas a carga nominal, pero en el régimen considerado, los procesos de arranque se repiten tan raramente que estas pérdidas pueden despreciarse.
Al determinar la potencia motriz de las máquinas universales (universales), se consideran máquinas con un modo de operación continuo, ya que en. el funcionamiento de estas máquinas también es posible en dicho modo. En este caso, la potencia del eje del motor eléctrico

donde Prn — la potencia de corte (nominal) más alta posible;
ηcn — eficiencia del circuito de movimiento principal de la máquina a carga nominal (valor generalmente cercano a 0,8).
La eficiencia de la máquina ηsn a plena carga puede definirse como el producto de la eficiencia de los engranajes individuales que forman una cadena cinemática cuando operan a una velocidad dada:

Cada velocidad corresponde a un cierto valor de la eficiencia de la máquina, dependiendo del número de engranajes y su tipo.
Con un aumento significativo en la velocidad de rotación, la pérdida de potencia en la máquina aumenta significativamente. Esto se debe al hecho de que algunas pérdidas crecen más rápido que la velocidad de rotación (por ejemplo, las pérdidas por mezcla de aceite en las cajas de engranajes).
 La potencia necesaria para impulsar los circuitos de potencia suele ser baja. Cuando se accionan juntos el circuito principal y el circuito de potencia, la potencia del motor debe ser aproximadamente un 5 % mayor que la potencia requerida para el circuito de accionamiento principal. Con una fuente de alimentación separada, su potencia debe determinarse de la misma manera que se hizo para el circuito de accionamiento principal. En este caso, la potencia del motor se gasta en alimentar y vencer la fricción en las guías y otros eslabones de transmisión.
La potencia necesaria para impulsar los circuitos de potencia suele ser baja. Cuando se accionan juntos el circuito principal y el circuito de potencia, la potencia del motor debe ser aproximadamente un 5 % mayor que la potencia requerida para el circuito de accionamiento principal. Con una fuente de alimentación separada, su potencia debe determinarse de la misma manera que se hizo para el circuito de accionamiento principal. En este caso, la potencia del motor se gasta en alimentar y vencer la fricción en las guías y otros eslabones de transmisión.
La eficacia de una cadena de suministro se puede determinar conociendo los elementos que componen esa cadena.Típicamente, el valor de esta eficiencia está en el rango de 0.1-0.2.
Las máquinas universales con motores seleccionados en función de las condiciones de carga más altas suelen estar bajo carga. Con tal trabajo, empeora significativamente. impulsar el rendimiento energético... La reducción de la potencia nominal del motor eléctrico respecto a la mayor carga posible conduce a una limitación de las posibilidades de utilización de la máquina. Considerando esto inaceptable, las plantas de máquinas-herramienta producen máquinas universales con motores eléctricos primarios instalados en ellas, seleccionados por la potencia más alta que estas máquinas pueden operar.
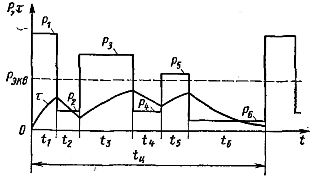
Arroz. 1. Horario de funcionamiento continuo con carga variable
Bajo carga variable a largo plazo, el funcionamiento del accionamiento eléctrico se caracteriza por un programa de carga similar al que se muestra en la Fig. 1.Cada transición de mecanizado de una pieza de máquina cortadora de metal corresponde a una determinada potencia del eje del motor. Los períodos de corte están separados por intervalos de inactividad de la máquina durante los cuales se alimenta y retira la herramienta y se cambia la pieza de trabajo.
El tiempo total para procesar una parte, incluidas todas las operaciones auxiliares, se denomina tiempo de ciclo tts. Lo mismo ocurre con las máquinas que procesan el mismo tipo de piezas y tienen un embrague de fricción en la cadena de transmisión principal, al igual que las máquinas de línea automática donde muchos motores eléctricos giran continuamente.
Cuando se opera con una carga variable, el motor debe seleccionarse para que pueda operar a su máxima potencia de acuerdo con el programa (selección de sobrecarga), para que cuando se opere con un programa de carga dado, el motor no se sobrecaliente por encima de lo normal (selección por calefacción). De las dos capacidades nominales determinadas por estas condiciones, se selecciona la mayor.
Capacidad de sobrecarga

donde Pn1 es la potencia nominal del motor requerida en condiciones de sobrecarga; Pmax — la potencia máxima del régimen de carga correspondiente al funcionamiento del motor en estado de equilibrio; λ1 — coeficiente de sobrecarga admisible.