Cargas estáticas en motores de mecanismos principales de grúas
La potencia y el par del eje del motor del polipasto de la grúa en el modo estático de elevación de la carga se pueden calcular mediante las fórmulas
donde P es la potencia del eje del motor, kW; G es la fuerza requerida para levantar la carga, N; G0 — fuerza de elevación del dispositivo de agarre, N; M es el momento del eje del motor, Nm; v es la velocidad de elevación de la carga, m / s; D es el diámetro del tambor del cabrestante de remolque, m; η — eficiencia del mecanismo elevador; i es la relación de transmisión de la caja de cambios y el polipasto de cadena.
En el modo de descenso, el motor de la grúa desarrolla una potencia igual a la diferencia entre la potencia de fricción Ptr y la potencia debida a la acción del peso de la carga descendente Pgr:
Al bajar cargas medianas y pesadas, la energía se dirige desde el eje del engranaje al motor porque Pgr >> Ptr (liberación del freno). En este caso, la potencia del eje del motor, en kW, se expresará mediante la fórmula

Al bajar cargas ligeras o un gancho vacío, puede haber casos en los que Pgr < Ptr.En este caso, el motor trabaja con un momento de movimiento (descenso de potencia) y desarrolla potencia, kW,

Según las fórmulas dadas, es posible determinar la potencia del motor de la grúa con cualquier carga en el gancho. Al calcular, debe recordarse que la eficiencia del mecanismo depende de su carga (Fig. 1).
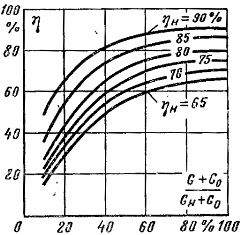
Arroz. 1. Dependencia de la eficiencia del mecanismo de la carga.
La potencia y el par en el eje de los motores de los mecanismos horizontales del movimiento de la grúa en el modo de operación estático se pueden determinar mediante las fórmulas.

donde P es la potencia del eje del motor del mecanismo de movimiento de la grúa, kW; M es el momento del eje motor del mecanismo de movimiento, Nm; G — peso de la carga transportada, N; G1 — propio peso del mecanismo de movimiento, N; v — velocidad de movimiento, m / s; R es el radio de la rueda, m; r es el radio del cuello del eje de la rueda, m; μ — coeficiente de fricción por deslizamiento (μ = 0,08-0,12); f — coeficiente de fricción de rodadura, m (f = 0,0005 — 0,001 m); η — eficiencia del mecanismo de movimiento; k — coeficiente que tiene en cuenta el rozamiento de las pestañas de las ruedas sobre los raíles; i — relación de transmisión del reductor del tren de rodaje.
En una serie de mecanismos de elevación y transporte, el movimiento no tiene lugar en una dirección horizontal. También es posible el efecto de la carga del viento, etc. La fórmula para determinar la potencia en este caso se puede representar como

Marcado adicionalmente: α — el ángulo de inclinación de las guías con respecto al plano horizontal; F — carga de viento específica, N / m2; S es el área sobre la cual actúa la presión del viento en un ángulo de 90°, m2.
En la última fórmula, el primer término caracteriza la potencia del eje del motor requerida para vencer la fricción durante el movimiento horizontal; el segundo término corresponde a la fuerza de sustentación, el tercero es el componente de potencia de la carga del viento.
Varias grúas tienen una plataforma giratoria en la que se encuentra el equipo de trabajo. El movimiento de la plataforma se transmite a través de una rueda dentada (plato giratorio) de diámetro Dkp montada sobre ella. Entre la plataforma y la base fija hay rodillos (rodillos) con un diámetro de dp. En este caso, la potencia y el par del motor de la grúa debido a las fuerzas de fricción se encuentran de manera similar al caso del movimiento alternativo, a saber:

Aquí, además de los valores conocidos: G2 es el peso del tocadiscos con todo el equipo encima, N; ωl — velocidad angular, plataformas, rad/seg; in — relación de engranajes de la caja de cambios del mecanismo de giro y el engranaje impulsor de la transmisión — plato giratorio.

Al determinar la potencia del accionamiento eléctrico de la grúa, en algunos casos es necesario tener en cuenta el cambio de carga cuando se trabaja en una pendiente. La carga del viento sobre los mecanismos giratorios se determina teniendo en cuenta la diferencia de las fuerzas del viento que actúan sobre la carga, el brazo de la grúa y el contrapeso.
Al diseñar accionamientos eléctricos para mecanismos de grúa, al final de la selección del motor, se comprueban los valores de aceleración admisibles del accionamiento eléctrico, cuyos datos se proporcionan en la tabla 1
Tabla 1 Nombre de los mecanismos y su finalidad
El nombre de los mecanismos y su propósito Aceleración, m / s2 Mecanismos de elevación destinados a levantar metales líquidos, objetos frágiles, productos, diversos trabajos de montaje 0.1 Mecanismos de elevación de parques de montaje y talleres metalúrgicos 0.2 — 0.5 Mecanismos de elevación de grúas de agarre 0.8 Mecanismos para movimiento de grúas destinadas a trabajos de montaje de precisión y transporte de metales líquidos, objetos frágiles 0,1 - 0,2 Mecanismos de movimiento con la fuerza de atracción de la gravedad al máximo 0,2 - 0,7 Carros de grúa de agarre completo 0,8 — 1,4 Giratorios de grúa 0,5 — 1,2