Accionamiento eléctrico de tiristores
 En la industria, los actuadores con válvulas semiconductoras controladas (tiristores) son ampliamente utilizados. Los tiristores se fabrican para corrientes de hasta cientos de amperios, para voltajes de hasta 1000 voltios o más. Se distinguen por su alta eficiencia, tamaño relativamente pequeño, alta velocidad y la capacidad de trabajar en una amplia gama de temperaturas ambientales (de -60 a +60 ° C).
En la industria, los actuadores con válvulas semiconductoras controladas (tiristores) son ampliamente utilizados. Los tiristores se fabrican para corrientes de hasta cientos de amperios, para voltajes de hasta 1000 voltios o más. Se distinguen por su alta eficiencia, tamaño relativamente pequeño, alta velocidad y la capacidad de trabajar en una amplia gama de temperaturas ambientales (de -60 a +60 ° C).
El tiristor no es un dispositivo completamente controlable, que se enciende aplicando el potencial correspondiente al electrodo de control, y se apaga solo por la interrupción forzada del circuito de corriente debido a la tensión de interrupción, su transición natural por cero o suministro de un amortiguador. tensión de signo contrario. Cambiando el tiempo de suministro de la tensión de control (su retardo), puede ajustar el valor medio de la tensión rectificada y, por tanto, la velocidad del motor.
El valor medio de la tensión rectificada en ausencia de regulación está determinado principalmente por el circuito de conmutación del convertidor de tiristores. Los circuitos transductores se dividen en dos clases: de tracción cero y puenteados.
En las instalaciones de media y alta potencia se utilizan principalmente circuitos convertidores puente, lo que se debe principalmente a dos motivos:
-
menos voltaje en cada uno de los tiristores,
-
ausencia de un componente de corriente constante que fluya a través de los devanados del transformador.
Los circuitos convertidores también pueden diferir en el número de fases: desde una en instalaciones de baja potencia hasta 12 — 24 en convertidores potentes.
Todas las variantes de convertidores de tiristores junto con propiedades positivas, como baja inercia, falta de elementos giratorios, tamaño más pequeño (en comparación con los convertidores electromecánicos), tienen una serie de desventajas:
1. Conexión dura a la red: todas las fluctuaciones de voltaje en la red se transmiten directamente al sistema de accionamiento y la carga aumenta, los ejes del motor se transfieren inmediatamente a la red y provocan choques de corriente.
2. Bajo factor de potencia cuando se ajusta el voltaje hacia abajo.
3. Generación de armónicos superiores, carga en la red eléctrica.
Las características mecánicas de un motor impulsado por un convertidor de tiristores están determinadas por el voltaje aplicado a la armadura y la naturaleza de su cambio con la carga, es decir, las características externas del convertidor y los parámetros del convertidor y del motor.
El dispositivo y principio de funcionamiento del tiristor.
Un tiristor (Fig. 1, a) es un semiconductor de silicio de cuatro capas con dos uniones pn y una unión n-p. La magnitud de la corriente Az que pasa a través del tiristor bajo la acción de la tensión de ánodo Ua depende de la corriente Az durante el control que pasa a través del electrodo de control bajo la acción de la tensión de control Uy.
Si no hay corriente de control (Azy = 0), entonces a medida que aumenta el voltaje U, la corriente A en el circuito del usuario P aumentará, sin embargo, permanecerá en un valor muy pequeño (Fig. 1, b).

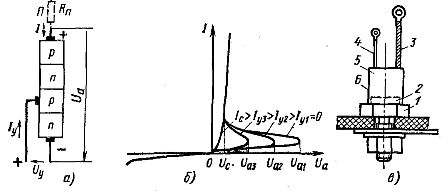
Arroz. 1. Diagrama de bloques (a), característica corriente-voltaje (b) y construcción (c) del tiristor
En este momento, la unión n-p encendida en la dirección no conductora tiene una alta resistencia. A un cierto valor Ua1 del voltaje del ánodo, llamado voltaje de apertura, encendido o conmutación, se produce una ruptura por avalancha de la capa de bloqueo.Su resistencia se vuelve pequeña y la intensidad de la corriente aumenta a un valor determinado de acuerdo con la ley de Ohm por la resistencia Rp del usuario p.
A medida que aumenta la corriente Iу, disminuye el voltaje Ua. La corriente Iu, en la que la tensión Ua alcanza el valor más bajo, se denomina corriente I con corrección.
El tiristor se cierra cuando se elimina el voltaje Ua o cuando cambia su signo. La corriente nominal I del tiristor es el valor promedio más grande de la corriente que fluye en la dirección directa que no causa un sobrecalentamiento inaceptable.
El voltaje nominal Un se denomina voltaje de amplitud más alto permitido en el que se garantiza la confiabilidad dada del dispositivo.
La caída de tensión ΔNo creada por la corriente nominal se denomina caída de tensión nominal (normalmente ΔUn = 1 — 2 V).
El valor de la intensidad de corriente Ic de la corrección fluctúa dentro de los límites de 0,1 — 0,4 A a una tensión Uc 6 — 8 V.
El tiristor se abre de forma fiable con una duración de pulso de 20 — 30 μs. El intervalo entre pulsos no debe ser inferior a 100 μs. Cuando el voltaje Ua cae a cero, el tiristor se apaga.
El diseño externo del tiristor se muestra en la fig.1, v… A base de cobre 1 Estructura de cuatro capas de silicio decimosexto 2 con cola roscada, con potencia negativa 3 y control de 4 salidas. La estructura de silicio está protegida por una carcasa cilíndrica de metal 5. El aislador está fijado en la carcasa 6. Se utiliza una rosca en la base 1 para instalar un tiristor y conectar la fuente de tensión del ánodo al polo positivo.
A medida que aumenta el voltaje Ua, disminuye la corriente de control requerida para abrir el tiristor (ver Fig. 1, b). La corriente de apertura de control es proporcional a la tensión de apertura de control uyo.
Si Uа cambia de acuerdo con la ley sinusoidal (Fig. 2), entonces el voltaje requerido y la apertura 0 se pueden representar con una línea de puntos. Si la tensión de control aplicada Uy1 es constante y su valor está por debajo del valor mínimo de la tensión uuo, entonces el tiristor no se abre.
Si la tensión de control aumenta al valor Uy2, el tiristor se abrirá tan pronto como la tensión Uy2 sea mayor que la tensión uyo. Al cambiar el valor u, puede cambiar el ángulo de apertura del tiristor en el rango de 0 a 90°.
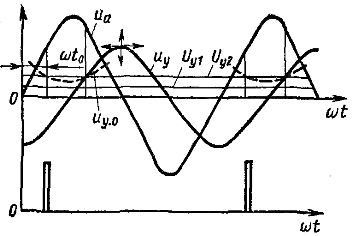
Arroz. 2. Control de tiristores
Para abrir el tiristor en ángulos superiores a 90 °, se usa un voltaje de control variable uy, que cambia, por ejemplo, sinusoidalmente. A un voltaje correspondiente a la intersección de la onda sinusoidal de este voltaje con la curva punteada uuo = f (ωt), el Tiristor se abre.
Al mover la sinusoide uyo horizontalmente hacia la derecha o hacia la izquierda, puede cambiar el ángulo ωt0 de apertura del tiristor. Este control de ángulo de apertura se llama horizontal. Se lleva a cabo utilizando interruptores de fase especiales.
Al mover la misma onda sinusoidal verticalmente hacia arriba o hacia abajo, también puede cambiar el ángulo de apertura. Tal gestión se llama vertical. En este caso, con control de voltaje variable tyy, agregue algebraicamente un voltaje constante, por ejemplo, el voltaje Uy1... El ángulo de apertura se ajusta cambiando la magnitud de este voltaje.
Una vez abierto, el tiristor permanece abierto hasta el final del semiciclo positivo y la tensión de control no afecta a su funcionamiento. Esto también hace posible aplicar control de pulso aplicando periódicamente pulsos de voltaje de control positivo en el momento adecuado (Fig. 2 abajo). Esto aumenta la claridad del control.
Al cambiar el ángulo de apertura del tiristor de una forma u otra, se pueden aplicar pulsos de voltaje de diferentes formas al usuario. Esto cambia el valor de la tensión media en los terminales del usuario.
Se utilizan varios dispositivos para controlar los tiristores. En el esquema mostrado en la fig. 3, la tensión de red de CA se aplica al devanado primario del transformador Tp1.
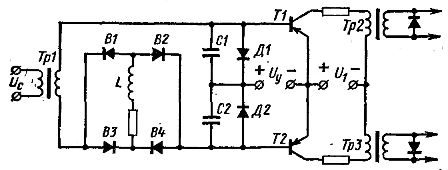
Arroz. 3. Circuito de control de tiristores
Se incluye un rectificador B de onda completa en el circuito secundario de este transformador. 1, B2, B3, B4 con una inductancia significativa L en el circuito de CC. Prácticamente se elimina la práctica corriente de onda. Pero tal corriente continua solo puede obtenerse mediante la rectificación de onda completa de una corriente alterna que tenga la forma que se muestra en la figura 1. 4, un.
Así, en este caso, el rectificador B1, B2, B3, B4 (ver Fig. 3) es un convertidor en forma de corriente alterna. En este esquema, los condensadores C1 y C2 se alternan en serie con pulsos de corriente rectangulares (Fig. 4, a).En este caso, en las placas de los condensadores C1 y C2 (Fig. 4, b), se forma un voltaje de diente de sierra transversal, aplicado a las bases de los transistores T1 y T2 (ver Fig. 3).
Este voltaje se llama voltaje de referencia. La tensión continua Uy también actúa en el circuito principal de cada transistor. Cuando el voltaje de la sierra es cero, el voltaje Uy crea potenciales positivos en las bases de ambos transistores. Cada transistor se abre con una corriente de base a un potencial de base negativo.
Esto sucede cuando los valores negativos del voltaje de referencia de la sierra resultan ser mayores que Uy (Fig. 4, b). Esta condición se cumple en función del valor de Uy a diferentes valores del ángulo de fase. En este caso, el transistor se abre por diferentes períodos de tiempo, dependiendo de la magnitud del voltaje Uy.
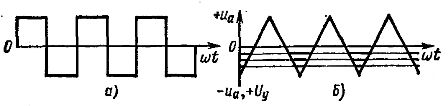
Arroz. 4. Diagramas de voltajes de control de tiristores
Cuando se abre uno u otro transistor, un pulso de corriente rectangular pasa a través del devanado primario del transformador Tr2 o Tr3 (ver Fig. 3). Cuando pasa el borde de ataque de este pulso, se produce un pulso de voltaje en el devanado secundario, que se aplica al electrodo de control del tiristor.
Cuando la parte posterior del pulso de corriente pasa por el devanado secundario, se produce un pulso de voltaje de polaridad opuesta. Este pulso está cerrado por un diodo semiconductor que pasa por alto el devanado secundario y no se aplica al tiristor.
Cuando se controlan los tiristores (ver Fig. 3) con dos transformadores, se generan dos pulsos, desfasados 180 °.
Sistemas de control de motores de tiristores
En los sistemas de control de tiristores para motores de CC, se utiliza un cambio en el voltaje de armadura de CC del motor para controlar su velocidad. En estos casos se suelen utilizar esquemas de rectificación multifase.
En la Fig. 5, y el diagrama más simple de este tipo se muestra con una línea continua. En este circuito, cada uno de los tiristores T1, T2, T3 está conectado en serie con el devanado secundario del transformador y la armadura del motor; NS. etc. c. los devanados secundarios están desfasados. Por lo tanto, los pulsos de voltaje que están desfasados entre sí se aplican a la armadura del motor cuando se controla el ángulo de apertura de los tiristores.
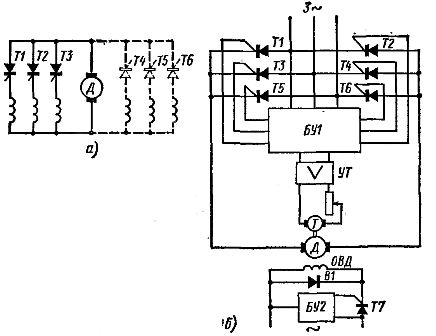
Arroz. 5. Circuitos de accionamiento de tiristores
En un circuito polifásico, las corrientes intermitentes y continuas pueden pasar a través de la armadura del motor, según el ángulo de disparo seleccionado de los tiristores. Un accionamiento eléctrico reversible (Fig. 5, a, todo el circuito) utiliza dos conjuntos de tiristores: T1, T2, T3 y T4, T5, T6.
Al abrir los tiristores de un determinado grupo, cambian la dirección de la corriente en la armadura del motor eléctrico y, en consecuencia, la dirección de su rotación.
La inversión del motor también se puede lograr cambiando la dirección de la corriente en el devanado de campo del motor. Tal inversión se usa en casos donde no se requiere alta velocidad porque el devanado de campo tiene una inductancia muy alta en comparación con el devanado de armadura. Tal carrera inversa se usa a menudo para accionamientos de tiristores del movimiento principal de las máquinas de corte de metales.
El segundo juego de tiristores también permite realizar modos de frenado que requieren un cambio en la dirección de la corriente en la armadura del motor eléctrico.Los tiristores en los circuitos de accionamiento en consideración se utilizan para encender y apagar el motor, así como para limitar las corrientes de arranque y frenado, eliminando la necesidad de usar contactores, así como reóstatos de arranque y frenado.
En los circuitos de excitación de tiristores de CC, los transformadores de potencia no son deseables, ya que aumentan el tamaño y el costo de la instalación, por lo que a menudo utilizan el circuito que se muestra en la Fig. 5B.
En este circuito, el encendido del tiristor es controlado por la unidad de control BU1. Está conectado a una red de corriente trifásica, proporcionando así energía y haciendo coincidir las fases de los pulsos de control con la tensión del ánodo de los tiristores.
Una unidad de tiristor generalmente usa retroalimentación de velocidad del motor. En este caso, se utilizan un tacogenerador T y un amplificador de transistor intermedio UT. También se utiliza la retroalimentación por correo electrónico. etc. c) motor eléctrico, realizado por la acción simultánea de retroalimentación negativa sobre el voltaje y retroalimentación positiva sobre la corriente del inducido.
Para ajustar la corriente de excitación, se usa un tiristor T7 con una unidad de control BU2. En semiciclos negativos del voltaje del ánodo, cuando el tiristor T7 no pasa corriente, la corriente en el OVD continúa fluyendo debido a e. etc. c. autoinducción, cerrando a través de la válvula de derivación B1.
Accionamientos eléctricos de tiristores con control de ancho de pulso
En los accionamientos de tiristores considerados, el motor es alimentado por pulsos de voltaje con una frecuencia de 50 Hz. Para aumentar la velocidad de respuesta, se recomienda aumentar la frecuencia de pulso.Esto se logra en unidades de tiristor con control de ancho de pulso, donde los pulsos de CC rectangulares de duración variable (latitud) con una frecuencia de hasta 2-5 kHz pasan a través de la armadura del motor. Además de la respuesta de alta velocidad, dicho control proporciona amplios rangos de control de velocidad del motor y un mayor rendimiento energético.
Con control de ancho de pulso, el motor es alimentado por un rectificador no controlado, y el tiristor conectado en serie con la armadura se cierra y abre periódicamente. En este caso, los pulsos de CC pasan por el circuito de armadura del motor. Un cambio en la duración (latitud) de estos pulsos da como resultado un cambio en la velocidad de rotación del motor eléctrico.
Dado que en este caso el tiristor funciona a tensión constante, se utilizan circuitos especiales para cerrarlo. Uno de los esquemas de control de ancho de pulso más simples se muestra en la Fig. 6.
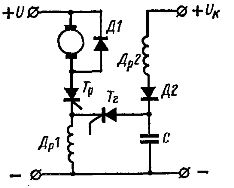
Arroz. 6. Accionamiento eléctrico de tiristores con control de ancho de pulso
En este circuito, el tiristor Tr se apaga cuando se enciende el tiristor de amortiguación Tr. Cuando este tiristor se abre, el capacitor C cargado se descarga a acelerador Dr1, creando un significativo e. etc. c) En este caso aparece una tensión en los extremos del estrangulador mayor que la tensión U del rectificador y dirigida hacia él.
A través de un diodo rectificador y shunt D1, este voltaje se aplica al tiristor Tr y hace que se apague. Cuando se apaga el tiristor, el capacitor C se carga nuevamente a la tensión de conmutación Uc > U.
Debido al aumento de la frecuencia de los pulsos de corriente y la inercia de la armadura del motor, la naturaleza de los pulsos de la fuente de alimentación prácticamente no se refleja en la suavidad de la rotación del motor. Los tiristores Tr y Tr se abren mediante un circuito de cambio de fase especial que permite cambiar el ancho del pulso.
La industria eléctrica produce varias modificaciones de unidades de potencia de CC de tiristores totalmente reguladas. Entre ellos se encuentran variadores con rangos de control de velocidad de 1:20; 1: 200; 1:2000 por cambio de tensión, accionamientos irreversibles y reversibles, con y sin frenado eléctrico. El control se lleva a cabo mediante dispositivos de transistor fase-pulso. Las unidades utilizan retroalimentación negativa en las rpm del motor y el contador electrónico, etc. con
Las ventajas de los accionamientos de tiristores son las características de alta energía, el tamaño y el peso reducidos, la ausencia de maquinaria giratoria que no sea un motor eléctrico, la alta velocidad y la disponibilidad constante para el trabajo. La principal desventaja de los accionamientos de tiristores es su costo aún alto, que supera significativamente el costo de las unidades con una máquina eléctrica y amplificadores magnéticos.
En la actualidad, existe una tendencia constante hacia la sustitución generalizada de accionamientos de CC de tiristores por convertidores de frecuencia de CA de frecuencia variable.