La selección de un motor eléctrico asíncrono para operar en el modo de frenado dinámico por autoexcitación.
 Motor eléctrico asíncrono con rotor devanado con el esquema de control más simple: la inclusión de resistencia en el circuito del rotor tiene propiedades de control extremadamente bajas. Por lo tanto, antes de la disponibilidad de convertidores de frecuencia en el mercado, se desarrollaron varios esquemas para obtener una velocidad reducida en modo reductor.
Motor eléctrico asíncrono con rotor devanado con el esquema de control más simple: la inclusión de resistencia en el circuito del rotor tiene propiedades de control extremadamente bajas. Por lo tanto, antes de la disponibilidad de convertidores de frecuencia en el mercado, se desarrollaron varios esquemas para obtener una velocidad reducida en modo reductor.
En realidad, no hay muchos de ellos. En el extranjero, se generalizó el uso de una máquina eléctrica adicional, un freno de vórtice montado en el mismo eje que el motor principal. El esquema le permite obtener características mecánicas suficientemente rígidas al bajar la carga, pero dicho accionamiento eléctrico tiene características de energía extremadamente bajas (la energía de frenado se libera en el freno de vórtice). Además, el freno de vórtice tiene un coste bastante elevado y complica mucho la disposición de la parte mecánica.
Por lo tanto, para obtener la velocidad de aterrizaje en mecanismos de elevación basados en un motor asíncrono con rotor de fase en la planta de Dynamo a fines de la década de 1970, un equipo de diseño liderado por E.M. Pevzner introdujo el frenado dinámico autoexcitado.
Tal accionamiento eléctrico se usa ampliamente en grúas domésticas (paneles de tipo TSD, TSDI, KSDB para grúas puente, pórtico y pórtico, paneles de control para grúas torre KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Así, estamos hablando de decenas de miles de grúas en funcionamiento.
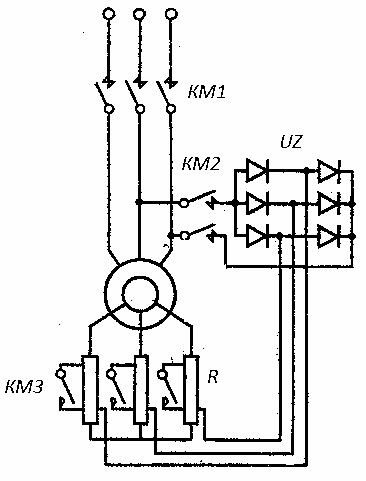
Arroz. 1. Esquema de inclusión de un motor asíncrono en modo de frenado dinámico por autoexcitación
El principio del frenado dinámico con autoexcitación es el siguiente:
El circuito del rotor incluye rectificador trifasico UZ (Fig. 1). El motor eléctrico se desconecta de la red a través del contactor KM1. La tensión rectificada se conecta al devanado del estator a través del contactor KM2. Los contactos del contactor KM3 están cerrados. Cuando se suelta el freno (no se muestra en el diagrama), el eje del motor comienza a girar bajo la acción del peso que cae.
Se induce un EMF en el devanado del rotor, bajo cuya influencia comienza a fluir una corriente en el circuito rotor-estator. El motor desarrolla el par de frenado, la carga desciende a una velocidad constante. El valor de la velocidad está determinado por el valor de la resistencia del circuito del rotor. Cuanto mayor sea la resistencia, más rápida será la velocidad de descenso. Para aumentar la velocidad, se apaga el contactor KM3.
En el modo de frenado dinámico de autoexcitación, el accionamiento eléctrico consume energía de la red solo para alimentar el empujador hidráulico del freno y el equipo relé-contactor. Como ejemplo, la Fig. 7 muestra las características mecánicas de un accionamiento eléctrico con panel TSD.
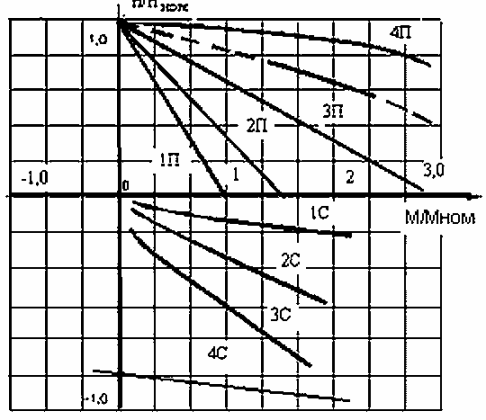
Arroz. 2. Características mecánicas del accionamiento eléctrico del mecanismo de elevación con el panel TSD
Las características de frenado dinámico se designan como 1C, 2C, 3C. Se puede apreciar que las características tienen suficiente dureza. El ajuste de velocidad se lleva a cabo en el rango 1: 8, que en la mayoría de los casos es suficiente para grifos masivos.
La condición para la autoexcitación del motor eléctrico es:
Donde x '2- resistencia inductiva del devanado del rotor, Ohm; хо- resistencia inductiva del circuito de magnetización. Om
Donde ks — coeficiente del esquema
kd — coeficiente de reducción de la corriente del rotor a la corriente del estator; kcx — coeficiente del circuito de corrección, para un circuito puente trifásico kx = 0,85; kt es el coeficiente de transformación del motor de estator a rotor
El coeficiente kd depende del esquema de conexión de los devanados del estator, que están conectados a una estrella en los motores de grifos domésticos a una tensión de red de 380 V.
El coeficiente kt depende del coeficiente de transformación, es decir de la relación entre la tensión del estator y la tensión del rotor, que depende del tipo de motor. Por ejemplo, para varios motores eléctricos de las series MT y 4MT, se tabulan el valor y los parámetros relacionados. 1.
Tabla 1.
Tipo de motor eléctrico potencia, kWt Tensión del rotor, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512 -6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
La condición кс ≥ √(1 + 2х '2/хо) se lleva a cabo para motores del tipo MTN412-6, 4MTN225L6, que pueden llamarse "excitados". Dichos motores eléctricos ingresan al modo de autoexcitación sin tomar decisiones de circuito adicionales. Sin embargo, en dispositivos completos de bajo voltaje (paneles de control o tableros de control de bajo voltaje) diseñados para trabajar junto con tales motores, se proporciona una pequeña excitación inicial para una operación confiable.
La excitación inicial se lleva a cabo pasando una constante, la llamada Un pequeño valor de "corriente de suministro" (generalmente no más del 10% de la corriente nominal del motor) de un rectificador de media onda. Para motores excitados, en cualquier caso, esto es suficiente para una transición fiable al modo de frenado dinámico autoexcitado.
Los motores eléctricos MTN512-6, 4MTN280M6, para los que no se cumple la condición кс ≥ √(1 + 2х '2/хо), están "sin excitar". Esto no significa que tales motores no puedan operar en modo de frenado dinámico con autoexcitación, pero el valor de la corriente adicional requerida para ellos alcanza el 50% de la corriente nominal del estator.Esto requiere el uso de NKU (paneles de control) especiales para motores eléctricos no excitados. …
El motor eléctrico tipo 4MTN280L10 con кс = √(1 + 2х '2/хо) está en el límite de autoexcitación y cualquier cambio aleatorio en los parámetros puede violar la condición de autoexcitación. Por lo tanto, dicho motor también puede clasificarse como no excitable.
El principal parámetro que afecta la capacidad del motor eléctrico para autoexcitarse es el voltaje nominal del rotor E2nom. El valor crítico de E2nom, en el que no se produce la autoexcitación sin una gran corriente de alimentación, debe tomarse como 300 V.
Esta característica del modo de frenado dinámico de autoexcitación fue tenida en cuenta por la planta Dynamo y Sibelektromotor PO al desarrollar una serie de motores eléctricos para grúas 4MT a principios de la década de 1980.
En particular, el valor E2nom para algunos motores eléctricos se ha reducido en comparación con la serie MT anterior para que los motores sean excitables.
Por ejemplo, para el motor eléctrico 4MTN225L6, ampliamente utilizado en el accionamiento eléctrico de grúas torre, E2nom se redujo en comparación con el motor de la serie MTN512-6 anterior de 340 a 290 V, lo que hizo que el motor fuera autoexcitado. Posteriormente, OJSC "Sibelectromotor" inició la producción del motor eléctrico 4MTM225L6 con los mismos parámetros.
Con el tiempo, otros fabricantes comenzaron a producir motores eléctricos con un propósito similar.
La Planta de Construcción de Grúas Rzhevsky produce el motor eléctrico MKAF225L6, la Compañía Electrotécnica de Siberia produce el motor eléctrico 4MTM225L6 PND.A pesar de la apariencia diferente al prototipo relacionada con las capacidades tecnológicas de cada uno de los fabricantes, todos estos motores eléctricos tienen los mismos parámetros eléctricos y dimensiones de instalación y son completamente intercambiables.
La diferencia en los nombres de los motores permite al usuario hacer una elección informada de uno u otro fabricante, guiado por sus propias preferencias, precio, plazo de entrega, etc. Y al mismo tiempo, tenga la absoluta certeza de que reemplazar un motor eléctrico de un fabricante de grifos por un motor eléctrico de otro fabricante no provocará un mal funcionamiento del grifo ni un accidente.
Sin embargo, en la última década, han aparecido en el mercado nacional motores eléctricos de diversos fabricantes, cuya marca reproduce exactamente la marca del motor eléctrico "original" producido por JSC "Sibelelectromotor". Se puede suponer que el origen de los motores eléctricos está conectado con el gran vecino oriental de nuestro país. Su precio es ligeramente más bajo que el de los fabricantes tradicionales, por lo que es comprensible el interés en ellos por parte de los suministros de las empresas.
Por lo tanto, al pedir un motor eléctrico para instalar en una grúa fabricada o reemplazar un motor eléctrico dañado en una grúa por uno que funcione, puede obtener un motor eléctrico de un fabricante desconocido, con un E2nom diferente del motor eléctrico prototipo.
La situación recuerda un poco a principios de los 90, cuando varios grupos de pop con el mismo nombre recorrieron el país al mismo tiempo.
Recordemos una vez más que la relación E2nom / I2nom es el parámetro más importante de un motor con rotor bobinado, que afecta la elección de las resistencias de arranque, el equipo relé-contactor y, como se mencionó anteriormente, en la condición de autoexcitación del motor. motor eléctrico.
Sin embargo, a menudo no hay ningún dato del rotor en las placas de identificación de los motores clonados. Aquí hay un ejemplo:
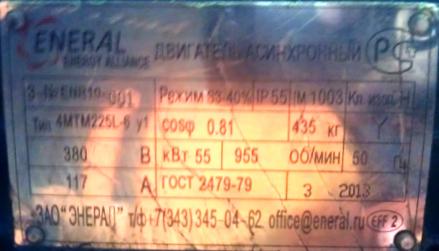
Arroz. 3. Placa de identificación del motor asíncrono de la grúa de rotor
Por cierto, este motor eléctrico tenía el valor «correcto» E2nom, solo que ahora había que determinarlo empíricamente.
En los catálogos de otros fabricantes para el motor eléctrico 4MTM225L6 se indica el valor E2nom = 340 V, es decir el motor excitado se convirtió en uno no excitado. La consecuencia del uso de un motor eléctrico de este tipo como parte de un accionamiento eléctrico con frenado dinámico con autoexcitación es una caída de la carga y la separación del motor eléctrico con destrucción mecánica de los devanados del rotor y del estator.
Es exactamente esta imagen la que el autor observó recientemente en una de las empresas rusas de construcción de maquinaria más antiguas, donde se entregó una nueva grúa puente con un motor eléctrico clonado del tipo 4MTM225L6 con E2n = 340 V. Solo por suerte, la gente no sufrir. Además, el propietario de la grúa restaura el motor tres (!) veces después de esquivar.
Otro fabricante de motores eléctricos clonados, aparentemente experimentando accidentes similares repetidamente, ahora produce dos motores eléctricos bajo la misma marca (!). Uno con E2nom = 340 V, el otro con E2nom = 264 V se proporciona en el catálogo con una nota: "para tomas tipo KB", es decir grúas torre.
De hecho, un motor de este tipo es el más utilizado en grúas torre, pero también se instala en grúas puente. Así puedes escuchar el diálogo entre el Proveedor y el Cliente: “¿Para qué grúa necesitas un motor? Para el suelo. Entonces toma este (E2nom = 340 V). » Y en el accionamiento de los polipastos eléctricos hay un cuadro de control con frenado dinámico autoexcitado. El resultado se describe arriba.
Al mismo tiempo, nadie dice que estos motores eléctricos sean defectuosos o poco confiables y que no puedan usarse en grúas. Cuantas más opciones haya en el mercado, mejor. Como dicen, hay más motores buenos y diferentes. Es solo que su marca engaña al consumidor, lo que puede tener consecuencias peligrosas.
Para utilizar un motor eléctrico con parámetros de rotor distintos al prototipo, debe:
-
Mida E2nom cuando el circuito del rotor está abierto y el devanado del estator está conectado a la red;
-
Con base en las mediciones de E2nom, calcule, seleccione y solicite resistencias de balasto;
-
Elija un panel de control para motores eléctricos sin excitación del catálogo y pídalo.
O simplemente puede preguntar sobre el valor de E2nom antes de pedir un motor que atraiga con su precio y acordarlo específicamente en el contrato. Sin embargo, esto no excluye la medición de E2nom durante el control de entrada del motor pedido.
Resumiendo lo anterior, podemos sacar las siguientes conclusiones:
-
En el accionamiento eléctrico de grifos domésticos basados en motores eléctricos de rotor de fase, se utiliza ampliamente el frenado dinámico autoexcitado. Decenas de miles de estos accionamientos eléctricos están en funcionamiento. Todavía se están emitiendo.
-
Para operar en modo de frenado dinámico autoexcitado, el motor eléctrico debe tener una cierta relación E2nom / I2nom.
-
La condición principal para la autoexcitación de un motor eléctrico con rotor bobinado es el valor de E2nom ≤ 300 V.
-
El uso de motores eléctricos con E2nom> 300 V con paneles de control diseñados para motores eléctricos excitados puede provocar la caída de la carga y destruir el motor eléctrico.