Sistemas de control automático cerrado
 Los sistemas de control automático (ACS) cerrados difieren de los circuitos abiertos en el equipo utilizado y en la integridad de la automatización. Con el ACS abierto, la unidad principal (incluido el equipo de control) no recibe información sobre el modo de funcionamiento real de la instalación eléctrica (motor de accionamiento, máquina en marcha).
Los sistemas de control automático (ACS) cerrados difieren de los circuitos abiertos en el equipo utilizado y en la integridad de la automatización. Con el ACS abierto, la unidad principal (incluido el equipo de control) no recibe información sobre el modo de funcionamiento real de la instalación eléctrica (motor de accionamiento, máquina en marcha).
En un ASUB cerrado, la información se transmite a los elementos de control, que va acompañada de la presentación de señales de comando apropiadas. El circuito que transmite dicha información cierra el lazo de control, formando un ACS cerrado o ACS de retroalimentación.
La diferencia entre ACS cerrado y abierto se puede explicar con el ejemplo de controlar la velocidad de un motor eléctrico en un sistema generador-motor (G-D). Con el ACS abierto (Fig. 1, a), la velocidad establecida del motor eléctrico se establece manualmente mediante el potenciómetro P. El ajuste de velocidad se realiza visualmente mediante un tacómetro, que es alimentado por el tacogenerador TG. El operador elimina cualquier desviación de la velocidad del punto de ajuste actuando sobre el control deslizante del potenciómetro.
En un SCA cerrado (Fig.1, b) el inducido del tacogenerador TG se incluye en el circuito de excitación del generador OVG, creando un sistema cerrado o de realimentación (en este caso con realimentación de velocidad).
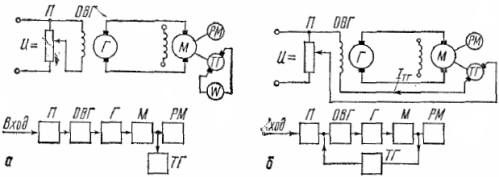
Arroz. 1. Circuito de control del motor eléctrico en el sistema G -M: a — ACS abierto, b — ACS cerrado
La corriente generada por el tacogenerador (Aztg) en circuito cerrado dirigida a la corriente del potenciómetro (Azn) y la corriente resultante actúa en el circuito igual a la diferencia geométrica de estas corrientes. Usando el control deslizante del potenciómetro, el operador establece el valor de la corriente resultante en la bobina de excitación del OVG, a la que se proporciona la velocidad correspondiente del motor eléctrico. Aquí es donde termina el papel del operador. En el futuro, el sistema mantiene automáticamente el modo de funcionamiento establecido del accionamiento eléctrico con cierta precisión.
Suponga que como resultado del pico de carga, la velocidad del motor eléctrico ha disminuido en comparación con la especificada. La reducción de la velocidad va acompañada de una reducción correspondiente de la velocidad del tacogenerador y de la tensión en sus terminales. Esto, a su vez, conducirá a una disminución de la corriente Aztg en el circuito de retroalimentación y en una determinada posición del control deslizante del potenciómetro, un aumento de la corriente resultante en el devanado de excitación del generador. El voltaje del generador y la velocidad del motor aumentarán en consecuencia.
El proceso de aumento de la velocidad y el voltaje continuará hasta que la corriente en el circuito de retroalimentación alcance el valor establecido y la velocidad del motor alcance el valor establecido.
En el análisis de los sistemas de control automático, gráficos de funciones… En la Fig.Esquema funcional de 2 transmisiones de ACS, que incluye los siguientes elementos:
1 - dispositivo principal que establece el modo de operación, da un comando, pulso de inicio o señal,
2 — elemento de comparación. Incluye la señal X1 del maestro, la señal X0, que determina la velocidad o nivel del valor controlado. Teniendo en cuenta la señal del noveno elemento de retroalimentación principal, el elemento 2 compara las señales recibidas y envía la señal adicionalmente corregida X2,
3 — el elemento transformador, la señal op lo transforma en otra forma, más conveniente para la transmisión ulterior. Por ejemplo, la señal X2 se suministra en forma de presión hidráulica (neumática, mecánica) y el elemento 3 la convierte en corriente eléctrica. Dado que este tipo de transformación puede requerir energía adicional, el elemento 3 se conecta a una fuente de energía PE,
4 — sumando elemento, recibe dos señales: X3 y X8 del elemento de corrección (elemento de memoria) 8. Estas señales son sumadas por el elemento 4 y enviadas al siguiente elemento,
5 — elemento amplificador, la señal de entrada X1 puede ser débil y debe ser amplificada para su posterior transmisión. Esto se hace a través del elemento 5 que está conectado a la fuente de alimentación PE,
6 — elemento ejecutivo, ejecuta la señal recibida (motor eléctrico, relé electromagnético, servomotor),
7 — objeto ajustable o máquina de trabajo.
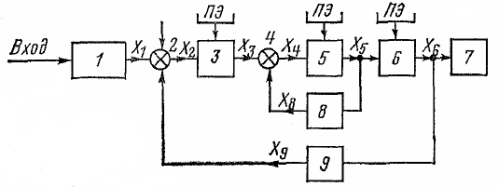
Arroz. 2. Diagrama funcional de ACS
Cada elemento de automatización es un convertidor de energía, en cuya entrada se aplica el valor X' y en la salida se elimina el valor X. «Para cada elemento en estado estacionario existe una determinada dependencia X» (X'), denominada característica estática.
Un sistema de control automático cerrado se caracteriza por la presencia de retroalimentación; tiene al menos un circuito de retroalimentación que conecta la salida del sistema con su entrada. Además, puede haber la llamada retroalimentación interna, que conecta la salida y la entrada de elementos individuales del ACS.
La retroalimentación se divide en dura y flexible. Las restricciones duras operan tanto en los modos de operación transitorios como estacionarios del sistema, flexibles, solo en los transitorios. Diferenciar entre retroalimentación positiva y negativa. A medida que aumenta el valor regulado, la conexión positiva lo aumenta aún más, y la negativa, por el contrario, disminuye. Las retroalimentaciones pueden transmitir señales proporcionales al ángulo de rotación, velocidad, voltaje, corriente, etc. y se denominan retroalimentaciones de ángulo, velocidad, voltaje y corriente en consecuencia. Para más detalles ver aquí: Elementos de los sistemas de automatización.
Según el principio de funcionamiento, ACS se puede dividir en tres grupos:
-
operación continua en la que no se rompe la relación entre los valores controlados y establecidos,
-
acción de impulso, en la que la conexión entre los valores controlados y establecidos se lleva a cabo a intervalos regulares,
-
acción de relé donde la comunicación solo ocurre cuando un valor alcanza un valor determinado.
Dependiendo de la ley según la cual un valor dado cambia con el tiempo, ACS también se puede dividir en tres grupos:
-
sistemas de consigna constante o baja en los que el valor controlado automáticamente se mantiene constante. Estos son sistemas de estabilización, que son esencialmente sistemas de control automático (ACS),
-
sistemas en los que el valor objetivo se cambia de acuerdo con un programa predeterminado específico. Es un sistema de gestión de software,
-
sistemas en los que un valor dado puede variar ampliamente y de acuerdo con una ley arbitraria, es decir, sistemas de seguimiento.