Circuitos de control de accionamiento eléctrico
 Dependiendo de la velocidad de los ascensores de pasajeros, se adoptan los siguientes tipos de circuitos de control de potencia:
Dependiendo de la velocidad de los ascensores de pasajeros, se adoptan los siguientes tipos de circuitos de control de potencia:
-
los ascensores de baja velocidad tienen motores de jaula de ardilla o de rotor de fase y un botón o palanca de control,
-
Ascensores de alta velocidad: motores de dos o una velocidad controlados por estaciones magnéticas o estaciones de control de tiristores (TSU-R) con botones de control,
-
Ascensores de alta velocidad y alta velocidad - Motores de corriente continua controlados por el sistema "generador - motor" con diferentes esquemas de excitación o por el sistema "tiristor convertidor - motor" con botones,
-
También se pueden utilizar cadenas de cascadas de válvulas asíncronas (AVK), cuyo uso permite aumentar la eficiencia. instalación.
Los ascensores de pasajeros, según el flujo de pasajeros, la altura de elevación y la cantidad de ascensores que atienden a los pasajeros, se dividen en control individual y grupal.
Los solteros incluyen:
a) ascensores que funcionan con órdenes únicas y llamadas sin cruzar paradas durante el descenso y ascenso de pasajeros,
b) ascensores con embarque de pasajeros al bajar, pero con prohibición de llamadas al subir,
c) las mismas, pero con registro de llamadas al descender con su posterior ejecución.
Los ascensores operados por grupos incluyen:
a) ascensores con un botón para llamar a los lugares de aterrizaje, independientemente del número de ascensores instalados (el doble control se usa más a menudo) y con embarque de pasajeros al descender,
b) lo mismo, pero con la recogida completa de pasajeros en los pisos intermedios de embarque y desembarque (generalmente instalados en edificios administrativos, educativos y otros).
Además, es muy común enviar ascensores a varias casas y barrios enteros, cuando se monitorea el estado de los circuitos desde una consola de despacho y se controlan varios ascensores.
Independientemente de la velocidad de los ascensores, control individual o en grupo de los mismos, los elementos necesarios de la mayoría de sus esquemas son los siguientes:
-
botones autoajustables, botones pegajosos o de cierre para llamar a los taxis y dar órdenes desde la cabina,
-
varios sensores de selección y dispositivos precisos de coincidencia de topes para registrar la ubicación de la cabina y el estado de los circuitos eléctricos,
-
sensores y enclavamientos para el estado de los cables de elevación, el estado de la mina y las puertas de la cabina (abiertas o cerradas),
-
interruptores de límite para limitar la velocidad y el grado de carga de la cabina,
-
indicadores de la dirección de movimiento de la cabina y, en algunos ascensores, la presencia de una carga en la cabina.
De estos elementos, nos detendremos con más detalle en los dispositivos de coincidencia de posición (PSC), que determinan el lugar donde debe detenerse el carro de la mina cuando se produce una llamada u orden, y su movimiento hacia arriba o hacia abajo.Los elementos restantes suelen ser varias modificaciones de interruptores de límite conocidos de otros cursos.
Estructuralmente, los dispositivos de ajuste de posición se implementan en forma de un conjunto de sensores electromecánicos, inductivos o magnéticos (reed) de tres posiciones ubicados en minas, con señales de salida a un relé o selector sin contacto en la sala de máquinas (a veces se implementan CCP en forma de unidades centrales de piso ubicadas en la sala de máquinas) …
Los sensores ubicados en la mina interactúan con los ramales montados en cabina (para electromecánicos) o shunts magnéticos (para interruptores inductivos o de láminas) y envían señales a la unidad central de piso (paso copiadora o relé de relé) instalada en la sala de máquinas, y la último transmite y un circuito de control — una señal para ejecutar el comando recibido.
Es más conveniente colocar los sensores para las señales de movimiento del automóvil hacia arriba o hacia abajo del automóvil (se necesitan menos cables) e instalar derivaciones magnéticas en las minas en los puntos necesarios. En este caso, con control digital, el número de columnas con derivaciones instaladas a lo largo del eje es igual al número de bits del número de piso transmitido en código binario u otro.
Los interruptores electromecánicos de tres posiciones se mueven a una de las posiciones correspondientes al movimiento de subida o bajada de la cabina, oa su parada, mediante un dispositivo de rizado.En este caso, cuando la cabina está en movimiento, los contactos de los interruptores de los pisos por los que se pasa se encienden en una de las posiciones finales, preparándose para la acción de la cadena de llamadas y órdenes, y cuando la cabina se detiene, el interruptor se enciende. desplazado a la posición media, desconectando el circuito de control de los contactores direccionales y excluyendo así que la cabina deje el piso cuando se presiona por error el botón de orden o llamada.
Con el fin de garantizar un frenado relativamente preciso de la cabina del ascensor, recientemente comenzaron a utilizarse sensores (reed) controlados magnéticamente, inductivos o sellados por contacto, en sus circuitos de control. Estos sensores están instalados tanto en la mina como en la cabina: en la mina hay sensores para selección (desaceleración), y en la cabina hay un sensor para parada precisa. Para interactuar con los sensores, se coloca una derivación selectiva magnética de linterna en la cabina y se colocan derivaciones ferromagnéticas de parada de precisión en el eje (en cada piso).
Los sensores inductivos consisten en un circuito magnético abierto en forma de U con una bobina encerrada en una carcasa. El devanado del relé ejecutivo está conectado en serie con él y se les aplica un voltaje de corriente alterna (U).
Con un circuito magnético abierto, el flujo magnético que atraviesa la bobina es pequeño. Por lo tanto, la f.e.m. y la corriente de autoinducción en los hilos de la bobina, así como la resistencia inductiva (X) provocada por ella, están prácticamente ausentes, por lo que la resistencia de la bobina está activa (R). La corriente en las bobinas conectadas en serie es relativamente grande; imita el cierre de los contactos en el sistema de contacto (el relé se enciende).
Cuando la derivación cierra el circuito magnético en forma de U, el flujo magnético que cruza su bobina aumenta y, por lo tanto, aumenta la fem. autoinducción así como la resistencia inductiva de la bobina debida a ella. Como resultado, la corriente en las bobinas conectadas en serie disminuye, simulando la apertura del circuito en el sistema de contacto (se apaga el relé ejecutivo).
El interruptor de láminas es un cuerpo en forma de U en el que en un lado de la ranura se colocan dos frascos de vidrio sellados con un vacío en el interior y contactos fijados en placas de resorte que se conectan a los respectivos circuitos de control del ascensor. En el otro lado de la ranura hay un imán permanente. El elemento de trabajo de tales sensores es una derivación ferromagnética que pasa a través del corte en forma de U cuando se mueve la cabina del ascensor.
El principio de funcionamiento de estos sensores es el siguiente: las fuerzas de resorte de las placas de contacto de los interruptores de láminas están dirigidas de modo que si el campo de un imán permanente no actúa sobre ellos, los contactos normalmente abiertos están abiertos y los normalmente abiertos. los contactos cerrados están cerrados, es decir, los circuitos a los que se conectan estos contactos se abrirán o cerrarán.
Esta condición de interruptor de lengüeta será cuando la derivación ferromagnética esté en la ranura de un cuerpo en forma de U, porque las líneas del campo magnético del imán permanente se cierran a través de la derivación. Una vez que la derivación sale de la ranura, las líneas del campo magnético se cierran a través de la derivación. las placas, venciendo su acción de resorte, y los contactos del interruptor de láminas, y por lo tanto los circuitos a los que están conectados, pasan al estado opuesto.

Como ejemplo que refleja las características principales de los esquemas de control de ascensores, considere el esquema de control para un solo ascensor sin paradas asociadas que se muestra en la Fig. 1. El ascensor da servicio a cuatro pisos; como motor ejecutivo se utiliza un motor asíncrono M de dos velocidades.
La inclusión de bajas (Ml) o altas (B) revoluciones del motor se realiza mediante los correspondientes contactores Ml y B. El sentido de giro del motor está determinado por los contactores B y H, deceleración — por una resistencia adicional P, parada — por freno electromagnético ET.
Utilizado como interruptores de piso sensores inductivos sin contacto (DTS, DTOV y DTON) conectados en serie con las bobinas del relé (RIS, RITOV, RITON). Los sensores TTP se utilizan para encender el accionamiento del ascensor a alta velocidad y dar un impulso para reducir la velocidad, mientras que los sensores DTOV y DTON están diseñados para detener con precisión el ascensor al nivel del piso correspondiente y se colocan en la cabina. las derivaciones magnéticas para ellos están instaladas en el eje del eje.
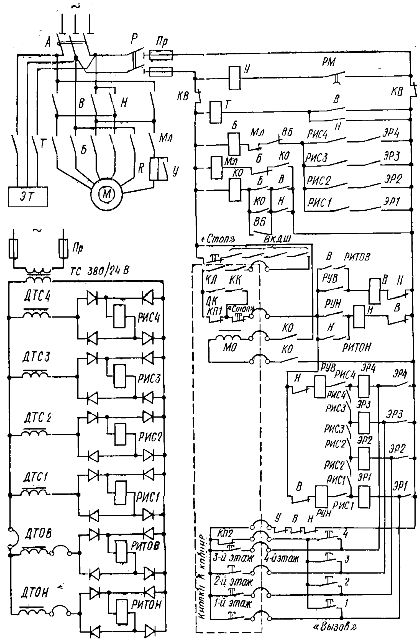
Arroz. 1. Diagrama esquemático de un solo control de ascensor
Consideremos el propósito de los elementos restantes del circuito y su funcionamiento usando el ejemplo de mover una cabina con un pasajero del 1er al 3er piso, suponiendo que la máquina automática A, el seccionador P y los finales de carrera KB que limitan el movimiento de subida y bajada de la cabina en los modos de emergencia, están cerrados y la cabina está en la planta baja. En este caso, las bobinas del relé RIS, además del relé del primer piso, fluyen de la corriente nominal.
Cuando se presiona el botón «3er piso», se forma el siguiente circuito eléctrico: fase de red — polo del seccionador P — fusible Pr — final de carrera KB — botón «Stop» — bloqueo de las puertas de la mina D1 — D4 — contactos para tensar la cuerda KK — final de carrera de seguridad KL — interruptores de la puerta de la cabina DK — contactos del botón «Stop» — bloque de apertura -contacto Í — bobina del relé RUV — contactos de cierre de los relés RIS4 y RISZ (las bobinas de estos relés llevan corriente) — bobina del relé de piso ERZ — botón «3er piso» — bloques de apertura — contactos de los contactores U, B, N — final de carrera KB — fusible R — polo seccionador P — fase de red.
Después de que se activan los relés RUV y ER3, se encienden el contactor de avance B, el contactor de avance rápido B (en el circuito de bobina B, contacto de bloque ML, interruptor de alta velocidad VB, contactos de relé RISZ y ER3). Cuando los contactos B y B están cerrados, el motor está conectado a la red eléctrica, el contactor T, la polea de liberación y el contactor de derivación KO, que enciende el solenoide de derivación MO y prepara el circuito de la bobina del contactor de baja velocidad Ml, son encendido. La carrera se retrae, liberando la palanca de bloqueo y la cabina comienza a moverse.
Cuando la cabina se acerca al tercer piso, la derivación ferromagnética cierra la bobina del sensor TTSZ, su resistencia aumenta y el relé RISZ desaparece, apagando los relés ER3 y RUV. Como resultado, el contactor B desaparece, cerrando su contacto, enciende el contactor de baja velocidad Ml, y el contactor B permanece encendido, porque cuando el automóvil está en movimiento, el circuito magnético del sensor de freno preciso aún no está cerrado, por lo tanto, el El contacto de RITOV aún no está abierto.El motor se detiene a baja velocidad operando en modo generador con una resistencia R. introducida en una fase del estator.
Tan pronto como el piso de la cabina está alineado con el piso del piso, la derivación magnética cierra el circuito magnético de la bobina del sensor de parada exacta DTOV, el relé RITOV desaparece y los contactores B, luego KO y finalmente ML se encienden. Como resultado, el electroimán del motor y el freno se desconectan de la red eléctrica, se aplica el freno mecánico y la cabina se detiene.
Aprender un esquema colectivo para controlar ascensores con paradas de paso solo al bajar la cabina o un esquema totalmente colectivo, es decir. cuando se detiene el paso mientras el automóvil se mueve hacia arriba y hacia abajo, es necesario en un esquema similar al discutido en la fig. 1, introduce algunas adiciones. Por ejemplo, en un circuito de motor de dos velocidades, los sensores inductivos ID, el relé RIS y los botones de llamada y pedido en cada piso se incluyen como se muestra en la Fig. 2.
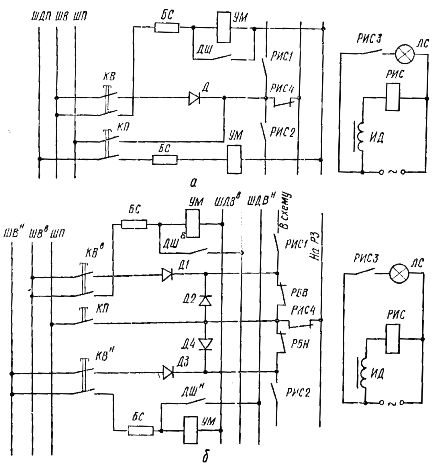
Arroz. 2. Fragmentos de adiciones a esquemas de control de ascensores colectivos (un piso)
En un esquema con paradas de paso al bajar la cabina (Fig. 2, a), las llamadas y órdenes se dan mediante botones adhesivos separados y, por lo tanto, pueden registrarse en cualquier momento y transmitirse al esquema de inmediato, excepto por el período de movimiento del cabina con pasajeros arriba cuando el bus de alimentación de los contactos de transferencia llama al circuito ejecutivo y son cortados por contactos selectivos del bus positivo.
En el esquema de control selectivo completo (Fig. 2, b) hay circuitos de timbre adicionales para cabinas de embarque (ШДВв) y descenso (ШДВн), los contactos de los relés de bloqueo RBV y RBN están conectados a los contactos del circuito ejecutivo del circuito seccional selectivo .
En los diagramas mostrados en las Figs. 1 y 2, en ausencia de una cabina en el piso, las bobinas del sensor inductivo ID y el relé RIS están energizados. Por lo tanto, cuando presiona el botón de comando de comando o llama a KV (los imanes de retención de UM los mantienen encendidos hasta que los superan los contactos de las puertas de la mina en este piso del DSh), se forma un circuito (no como se muestra en las figuras) que incluye el relé de control de subida RUV si la planta de destino está más alta que la del aparcamiento, o el relé de control de bajada LVL si la planta de destino está por debajo del aparcamiento.
Después de la llegada de la cabina al piso de llamadas, se ventila el ID del sensor inductivo, se apaga el relé RIS, abriendo sus contactos, lo que apaga el relé RUV o RUN y la lámpara LS (la cabina se detiene), y cerrando el contacto RIS4 se prepara un circuito para la ejecución de la orden procedente del coche.
En el circuito colectivo completo, el circuito dividido por los contactos RIS1 y RIS2 en el piso del estacionamiento del automóvil se rompe no solo por estos contactos, sino también por los contactos del relé de bloqueo arriba RBV o abajo RBN (sus bobinas no se muestran en el diagrama), y los circuitos de elevación, descenso y orden están separados entre sí mediante diodos de separación D1 — D4.
Antes de pulsar el botón de llamada o pedido, si aún no se ha seleccionado el sentido de marcha del vehículo, se cierran todos los contactos del circuito de selección de sentido, excepto los contactos RIS4 de la planta de parking.Por lo tanto, cuando se presiona uno de estos botones, las señales de llamada de los pisos ubicados sobre el piso del estacionamiento se conectan a la bobina del relé RUN, y las señales de llamada de los pisos debajo del estacionamiento incluyen el relé RUV. Después de seleccionar la dirección, simultáneamente con el relé RUV o LVL, se enciende uno de los relés de bloqueo de dirección opuesta RBV o RBN, que interrumpe la salida a través del circuito seccional de señales de llamada no transitorias con sus contactos.
En el esquema mostrado en la fig. 2, a, para bajar a los pasajeros, la cabina va sin parar hasta el piso más alto de la conversación y luego desciende con paradas de paso, y en el esquema que se muestra en la fig. 2, b, si es necesario recoger pasajeros, la cabina va al piso más bajo de la llamada, luego sube con paradas de paso.
En los esquemas considerados, los selectores están hechos en elementos de relé. Junto a éste, se utilizan otros selectores: leva, fotoeléctrico, seguimiento continuo de cepillos, paso a paso, sobre elementos estáticos, etc.
Con grandes flujos de pasajeros, se instalan varios ascensores en un pasillo, que tienen control combinado en parejas o grupos para aumentar la comodidad y mejorar la potencia. El número de ascensores conectados en grupos no suele exceder de cuatro, pero más a menudo de tres, aunque se conocen sistemas que contienen hasta ocho ascensores en un grupo.
En el control de grupo, generalmente hay tres modos principales de operación del ascensor: ascenso máximo, descenso máximo y movimiento equilibrado en ambas direcciones. La activación de los ascensores para uno u otro modo se realiza por el despachador o automáticamente mediante el reloj programador instalado para cada grupo de ascensores.
En edificios de gran altura, cada grupo de ascensores se fija para dar servicio a una determinada área de pisos, otros pisos no son atendidos por él. Si hay varios ascensores en el grupo que dan servicio a un área oa un edificio de poca altura, para aumentar la velocidad media de movimiento reduciendo el número de paradas, se pueden asignar ascensores separados para dar servicio a los pisos pares e impares.
Para efectuar el control dual o grupal de ascensores, sus circuitos de control deben ser colectivos y las llamadas a cada piso en ambas direcciones deben registrarse por separado en cada dirección mediante dispositivos de almacenamiento adecuados que contengan relés, transistores, etc.
Como ejemplo que refleja las especificaciones de operación en el control emparejado de ascensores con relés de estacionamiento adicionales del primer ascensor 1PC y el segundo ascensor 2PC, considere un fragmento del diagrama esquemático que se muestra en la fig. 3.
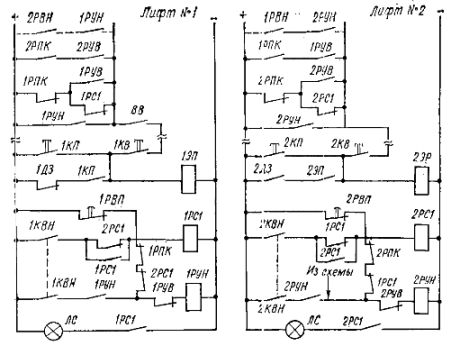
Arroz. 3. Fragmento de un diagrama esquemático de control de ascensor emparejado: ER — relé de piso, RPK — relé de conmutación de canal, relé de arranque automático RVP
En este caso, el coche que descendió con pasajeros en el primer piso no responde a las llamadas de otros pisos y espera a los pasajeros. Si no hay ningún coche en el primer piso, entonces el coche que subió por orden y se suelta se envía automáticamente al primer piso, y cuando se baja o estaciona otro coche, el último se queda en el piso al final del vuelo. o va al centro de carga y se utiliza para operaciones de llamada principalmente en la dirección de hundimiento.
El relé de estacionamiento de la cabina del primer piso 1PC1 o 2PC1 se enciende después de la llegada de la cabina del primer piso desde el interruptor de límite 1KVN o 2KVN (instalado en las minas de la copiadora). Estos relés están bloqueados.Por tanto, la inclusión de uno de ellos indica que este coche llegó al primer piso antes que el otro. En este caso, el relé 1PC1 o 2PC1 con su contacto de cierre enciende la lámpara de señal LS y con su contacto de apertura rompe el circuito de timbre de su ascensor, interrumpiendo la llamada mientras el automóvil está estacionado en el primer piso.
Cuando la cabina sale del primer piso, su lámpara de señal LS se apaga, la energía de los circuitos llamados de este ascensor se restablece inmediatamente después de que se libera la cabina, y después de que la cabina de otro ascensor llega al primer piso, su relé de computadora es encendido Esta cabina permanece en la planta baja y espera a los pasajeros (lo que se indica con el encendido del testigo LS). Cuando se libera la cabina que ha subido al orden y no hay llamadas, se envía una señal al circuito que enciende las bobinas del relé 1RUN o 2RUV 1RUN o 2RUV a través de los contactos de apertura del final de carrera 1KVN o 2KVN, y la cabina va al primer piso, y t .n.
El equipo de control de motores de los ascensores típicos de control individual, doble y de grupo generalmente se encuentra en paneles, estaciones o unidades de control típicos instalados en salas de máquinas.