Regulación de frecuencia de un motor asíncrono
Actualmente, el control de frecuencia de la velocidad angular de rotación de un accionamiento eléctrico con un motor asíncrono se usa ampliamente, ya que permite en un amplio rango cambiar suavemente la velocidad de rotación del rotor tanto por encima como por debajo del valor nominal.
Los convertidores de frecuencia son dispositivos modernos de alta tecnología con un amplio rango de ajuste que tienen un amplio conjunto de funciones para controlar motores asíncronos. La más alta calidad y confiabilidad hacen posible su uso en diversas industrias para controlar accionamientos de bombas, ventiladores, transportadores, etc.

Los convertidores de frecuencia para tensión de alimentación se dividen en monofásicos y trifásicos, pero por diseño, en máquinas eléctricas estáticas y rotativas. En los convertidores de máquinas eléctricas, la frecuencia variable se obtiene utilizando máquinas eléctricas convencionales o especiales. V convertidores de frecuencia estáticos el cambio en la frecuencia de la corriente de suministro se logra mediante el uso de elementos eléctricos que no tienen movimiento.
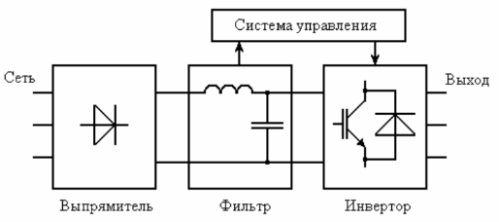
Circuito convertidor de frecuencia de un motor de inducción.
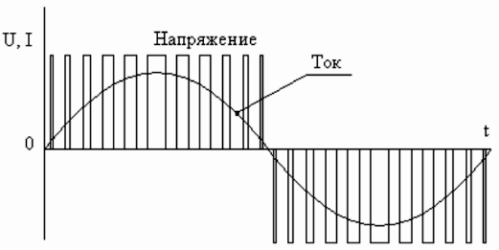
Señal de salida del convertidor de frecuencia
Los convertidores de frecuencia para red monofásica pueden proporcionar accionamiento eléctrico para equipos de producción con una potencia de hasta 7,5 kW. Una característica del diseño de los convertidores monofásicos modernos es que en la entrada hay una fase con un voltaje de 220 V, y en la salida hay tres fases con el mismo valor de voltaje, lo que permite conectar motores eléctricos trifásicos a un dispositivo sin utilizar condensadores.
Los convertidores de frecuencia alimentados por red trifásica de 380V están disponibles en el rango de potencia de 0,75 a 630 kW. Dependiendo del valor de la potencia, los dispositivos se fabrican en cajas combinadas de polímero y metálicas.
La estrategia de control más popular para motores de inducción es el control vectorial. Actualmente, la mayoría de los convertidores de frecuencia implementan control vectorial o incluso control vectorial sin sensor (esta tendencia se encuentra en convertidores de frecuencia que originalmente implementan control escalar y no tienen terminales para conectar un sensor de velocidad).
Según el tipo de carga de salida, los convertidores de frecuencia se subdividen según el tipo de implementación:
-
para accionamientos de bombas y ventiladores;
-
para propulsión eléctrica industrial general;
-
funciona como parte de los motores eléctricos que funcionan con sobrecarga.

Características mecánicas de las cargas típicas
Los convertidores de frecuencia modernos tienen un conjunto diverso de características funcionales, por ejemplo, tienen control manual y automático de la velocidad y dirección de rotación del motor, así como potenciómetro incorporado en el panel de control.Dotado de la capacidad de ajustar el rango de frecuencia de salida de 0 a 800 Hz.
Los convertidores pueden controlar automáticamente un motor asíncrono de acuerdo con las señales de los sensores periféricos y accionar un accionamiento eléctrico de acuerdo con un algoritmo de temporización determinado. Admite funciones de recuperación automática en caso de corte de energía a corto plazo. Realice el control de transitorios desde una consola remota y proteja los motores eléctricos de sobrecargas.

La relación entre la velocidad angular de rotación y la frecuencia de la corriente de suministro se deduce de la ecuación
ωo = 2πe1/ p
Con una tensión de alimentación U1 constante y un cambio en la frecuencia, el flujo magnético del motor de inducción cambia. Al mismo tiempo, para un mejor uso del sistema magnético, con una disminución en la frecuencia de la fuente de alimentación, es necesario reducir el voltaje proporcionalmente, de lo contrario, la corriente de magnetización y las pérdidas en el acero aumentarán significativamente.
Del mismo modo, a medida que aumenta la frecuencia de alimentación, la tensión debe aumentar proporcionalmente para mantener constante el flujo magnético, porque de lo contrario (con un par de eje constante) esto hará que aumente la corriente del rotor, sobrecargando de corriente sus devanados y reduciendo el par máximo.
La ley de regulación racional de voltaje depende de la naturaleza del momento de resistencia.
En un momento constante de carga estática (Ms = const), el voltaje debe ser regulado en proporción a su frecuencia U1 / f1 = const. Por la naturaleza de la carga del ventilador, la relación toma la forma U1 / f21 = const.
Con par de carga inversamente proporcional a la velocidad U1 /√f1 = const.
Las siguientes figuras muestran un diagrama de conexión simplificado y las características mecánicas de un motor de inducción con control de frecuencia de velocidad angular.
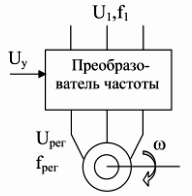
Diagrama de conexión de un convertidor de frecuencia a un motor asíncrono
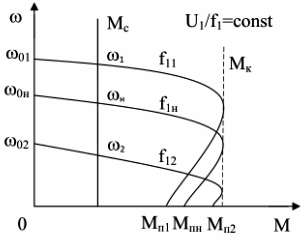
Características para una carga con un momento de resistencia estático constante
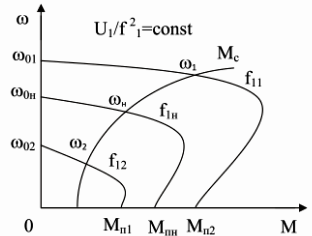
NSCaracterísticas para cargar el ventilador
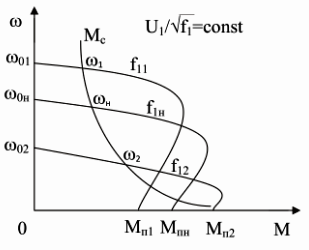
Características bajo carga estática par inversamente proporcional a la velocidad angular de rotación
La regulación de frecuencia de la velocidad de un motor asíncrono le permite cambiar la velocidad angular de rotación en el rango de 20 … 30 a 1. La regulación de la velocidad de un motor asíncrono desde el principal se lleva a cabo prácticamente a cero.
Cuando cambia la frecuencia de la red de suministro, el límite superior de la velocidad de rotación de un motor asíncrono depende de sus propiedades mecánicas, especialmente porque a frecuencias superiores al nominal, el motor asíncrono funciona con mejores características energéticas que a frecuencias más bajas. Por tanto, si se utiliza un reductor en el sistema de accionamiento, este control de frecuencia del motor debe realizarse no sólo hacia abajo, sino también hacia arriba desde el punto nominal, hasta la velocidad de rotación máxima admisible en las condiciones de resistencia mecánica del motor. el rotor
Cuando la velocidad del motor aumenta por encima del valor indicado en su pasaporte, la frecuencia de la fuente de energía no debe exceder la nominal en no más de 1,5 a 2 veces.
El método de frecuencia es el más prometedor para la regulación de un motor de inducción de rotor de jaula de ardilla. Las pérdidas de potencia con dicha regulación son pequeñas, ya que no van acompañadas de un aumento de la corrimiento… Las características mecánicas resultantes son de gran rigidez.