Características mecánicas de un motor de inducción en diferentes modos, voltajes y frecuencias
 Las características mecánicas de los motores de inducción se pueden expresar como n = f (M) o n=e(I). Sin embargo, las características mecánicas de los motores asíncronos a menudo se expresan en forma de una dependencia M = f(S), donde C — deslizamiento, S = (nc-n) / nc, donde ns — velocidad síncrona.
Las características mecánicas de los motores de inducción se pueden expresar como n = f (M) o n=e(I). Sin embargo, las características mecánicas de los motores asíncronos a menudo se expresan en forma de una dependencia M = f(S), donde C — deslizamiento, S = (nc-n) / nc, donde ns — velocidad síncrona.
En la práctica, se utiliza una fórmula simplificada denominada fórmula de Kloss para la construcción gráfica de las características mecánicas:

aquí: Mk — valor de par crítico (máximo). Este valor de momento corresponde al deslizamiento crítico

donde λm = Mk / Mn
La fórmula de Kloss se utiliza para resolver problemas relacionados con el accionamiento eléctrico realizado mediante un motor de inducción. Usando la fórmula de Kloss, puede construir un gráfico de características mecánicas de acuerdo con los datos de pasaporte del motor de inducción. Para cálculos prácticos, solo se debe considerar el signo más en la fórmula al determinar el momento crítico antes de la raíz.
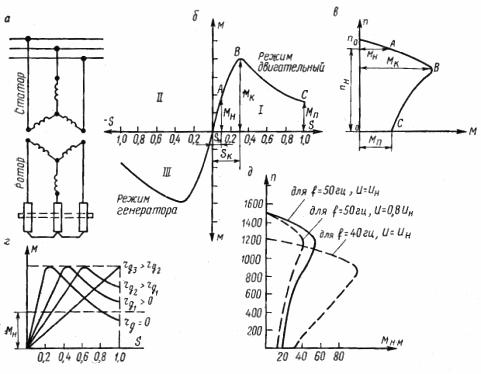
Arroz. 1.Motor asíncrono: a — diagrama esquemático, b — característica mecánica M = f (S) — natural en los modos de motor y generador, c — característica mecánica natural n = f (M) en el modo de motor, d — características mecánicas de un reóstato artificial, e — características mecánicas para diferentes voltajes y frecuencias.

Motor de inducción de jaula de ardilla
Como puede verse en la fig. 1, características mecánicas de un motor de inducción ubicado en los cuadrantes I y III. La parte de la curva en el cuadrante I corresponde a un valor de deslizamiento positivo y caracteriza el modo de operación del motor asíncrono, y en el cuadrante III, el modo generador. El modo motor es de gran interés práctico.
El gráfico de las características mecánicas del modo del motor contiene tres puntos característicos: A, B, C y se puede dividir condicionalmente en dos secciones: OB y BC (Fig. 1, c).
El punto A corresponde al par nominal del motor y está determinado por la fórmula Mn = 9,55•103•(Strn /nn)
Este momento corresponde deslizamiento nominal, que para motores con aplicación industrial general tiene un valor en el rango de 1 a 7%, es decir, Sn = 1 - 7%. Al mismo tiempo, los motores pequeños tienen más deslizamiento y los grandes tienen menos.
Los motores de alto deslizamiento destinados a cargas de choque tienen Сn~15%. Estos incluyen, por ejemplo, motores de CA de una sola serie.
El punto C de la característica corresponde al valor de par inicial que se produce en el eje del motor en el arranque. Este momento Mp se llama inicial o de arranque. En este caso, el deslizamiento es igual a la unidad y la velocidad es cero. Par de arranque es fácil de determinar a partir de los datos de la tabla de referencia, que muestra la relación entre el par de arranque y el Mp / Mn nominal.
La magnitud del par de arranque a valores constantes de voltaje y frecuencia actual depende de la resistencia activa en el circuito del rotor. En este caso, inicialmente a medida que aumenta la resistencia activa, aumenta el valor del par de arranque, alcanzando su máximo cuando la resistencia activa del circuito del rotor es igual a la resistencia inductiva total del motor. Posteriormente, a medida que aumenta la resistencia activa del rotor, el valor del par inicial disminuye, tendiendo a cero en el límite.
El punto C (Fig. 1, b y c) corresponde a un momento máximo que puede desarrollar el motor en todo el rango de revoluciones desde n = 0 hasta n = ns... Este momento se denomina momento crítico (o de vuelco) Mk . El momento crítico también corresponde al deslizamiento crítico Sk. Cuanto menor sea el valor del deslizamiento crítico Sk, así como el valor del deslizamiento nominal Сn, mayor será la rigidez de las características mecánicas.
Los momentos inicial y crítico están determinados por los nominales. Según GOST para máquinas eléctricas con motor de jaula de ardilla, se debe cumplir la condición Mn / Mn = 0,9 - 1,2, Mk / Mn = 1,65 - 2,5.
Cabe señalar que el valor del momento crítico no depende de la resistencia activa del circuito del rotor, mientras que el deslizamiento crítico Сk es directamente proporcional a esta resistencia.Esto significa que con un aumento en la resistencia activa del circuito del rotor, el valor del momento crítico permanece sin cambios, pero el máximo de la curva de par cambia a valores de deslizamiento crecientes (Fig. 1, d).
La magnitud del par crítico es directamente proporcional al cuadrado del voltaje aplicado al estator e inversamente proporcional al cuadrado de la frecuencia de los voltajes y la frecuencia de la corriente en el estator.
Si, por ejemplo, la tensión suministrada al motor es igual al 85 % del valor nominal, entonces la magnitud del par crítico será 0,852 = 0,7225 = 72,25 % del par crítico a la tensión nominal.
Se observa lo contrario al cambiar la frecuencia. Si, por ejemplo, a un motor diseñado para funcionar con una frecuencia de corriente de = 60 Hz, se le suministra corriente con una frecuencia de = 50 Hz, entonces el momento crítico llegará a (60/50)2=1,44 veces mayor que el oficial valora su frecuencia (Fig. 1, e).
El momento crítico caracteriza la capacidad de sobrecarga instantánea del motor, es decir, muestra qué momento (en pocos segundos) de sobrecarga es capaz de soportar el motor sin consecuencias perjudiciales.

La sección de la característica mecánica desde cero hasta el valor máximo (crítico) (ver Fig. 1, biv) se denomina parte estable de la característica, y la sección BC (Fig. 1, c) es la parte inestable.
Esta división se explica por el hecho de que en la parte creciente de las características OF con deslizamiento creciente, es decir a medida que disminuye la velocidad, aumenta el par desarrollado por el motor.Esto significa que a medida que aumenta la carga, es decir, a medida que aumenta el par de frenado, disminuye la velocidad de rotación del motor y aumenta el par aumentado por ella. Cuando la carga disminuye, por el contrario, la velocidad aumenta y el par disminuye. A medida que la carga cambia en todo el rango de la parte estable de la característica, la velocidad de rotación y el par del motor cambian.
El motor no puede desarrollar más que el par crítico, y si el par de frenado es mayor, el motor debe detenerse inevitablemente. Un vuelco del motor ocurre, como dicen.
Una característica mecánica con U e I constantes y la ausencia de resistencia adicional en el circuito del rotor se denomina característica natural (característica de un motor de inducción de jaula de ardilla con rotor devanado sin resistencia adicional en el circuito del rotor). Se denominan características artificiales o reostáticas a las que corresponden a la resistencia adicional en el circuito del rotor.
Todos los valores de par de arranque son diferentes y dependen de la resistencia activa del circuito del rotor. Deslizadores de diferentes magnitudes corresponden al mismo par nominal Mn. A medida que aumenta la resistencia del circuito del rotor, aumenta el deslizamiento y, por lo tanto, disminuye la velocidad del motor.
Debido a la inclusión de resistencia activa en el circuito del rotor, la característica mecánica en la parte estable se estira en la dirección de deslizamiento creciente, proporcional a la resistencia.Esto significa que la velocidad del motor comienza a variar significativamente según la carga del eje y la característica dura se vuelve blanda.