Invertir y detener el motor de inducción de jaula de ardilla
Un motor de inducción es una máquina reversible. Para cambiar la dirección de rotación del rotor, es necesario cambiar la dirección de rotación del campo magnético (cambiando los cables de alimentación a los terminales de las dos fases del motor) — Circuitos de arranque y freno del motor
Las características mecánicas para dos direcciones de rotación se muestran en la Fig. 1.
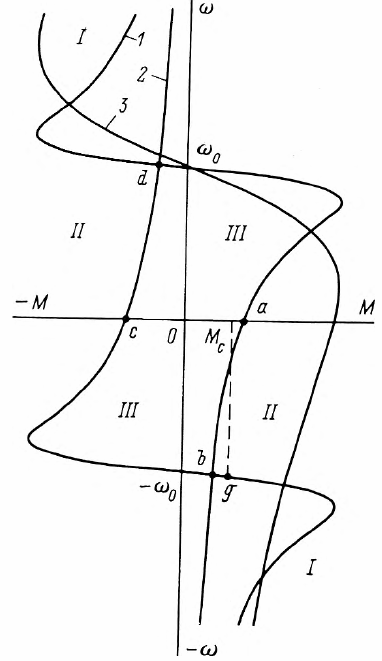
Arroz. 1. Familia de características mecánicas de un motor de inducción para funcionamiento reversible en modo de parada con suministro de energía a la red (I), modo de oposición (II) y motor (III) 1, 2 — natural; 3 — artificiales.
Un motor de inducción de jaula de ardilla se puede utilizar no solo como motor sino también como freno. En modo de parada, cada motor eléctrico funciona siempre como generador. En este caso, un motor eléctrico de inducción con rotor en jaula de ardilla puede tener tres modos de frenado.
En el modo de frenado regenerativo, la máquina funciona con deslizamiento negativo. En este caso, la velocidad del rotor supera la velocidad de rotación del campo magnético.Por supuesto, para cambiar a este modo, se debe aplicar un momento activo externo al costado del eje.
El modo de realimentación es muy utilizado en instalaciones de elevación. Durante el descenso, el sistema de propulsión, debido a la energía potencial de la carga, puede adquirir una velocidad superior a la velocidad de rotación del campo magnético, y el descenso se producirá en un estado de equilibrio correspondiente a un determinado punto g de la característica mecánica. , cuando el momento estático creado por la carga descendente se equilibra con el par de frenado del motor.
En los accionamientos convencionales con par estático reactivo, el modo en cuestión se implementa solo por medio de circuitos de control especiales, que permiten reducir la velocidad de rotación del campo magnético. En la misma figura se muestran las características mecánicas de una máquina de inducción para modo realimentación. 1.
Como se muestra, el par máximo en el modo generador es ligeramente mayor que en el modo motor, y el deslizamiento crítico en valor absoluto es el mismo.
Los generadores asíncronos como tales tienen un rango muy estrecho, a saber plantas de energía eólica... Dado que la fuerza del viento no es constante y, en consecuencia, la velocidad de rotación del dispositivo cambia significativamente, en estas condiciones es preferible un generador asíncrono.
El más utilizado es el modo de frenado — oposición. La transición a este modo de motores asíncronos, así como motores de CC, es posible en dos casos (Fig. 1): con un aumento significativo en el par estático (sección ab) o cuando se cambia el devanado del estator para una dirección de rotación diferente ( sección cd).
En ambos casos, el motor opera con un deslizamiento mayor que 1 hasta que las corrientes superan las corrientes de arranque. Por lo tanto, para un motor de jaula de ardilla, este modo solo se puede usar para detener rápidamente el variador.
Cuando se alcanza la velocidad cero, el motor debe desconectarse de la red eléctrica, de lo contrario, tenderá a acelerar en la dirección opuesta.
Cuando se frena con motores de rotor bobinado opuesto, se debe introducir una resistencia de reóstato en el circuito del rotor para limitar la corriente y aumentar el par de frenado.
También es posible modo de frenado dinámico… Sin embargo, esto plantea algunas dificultades. Cuando se desconecta el motor de la red, el campo magnético de la máquina también desaparece. Es posible excitar una máquina de inducción desde una fuente de corriente continua que está conectada a un estator desconectado de la red de corriente alterna. La fuente debe proporcionar una corriente en el devanado del estator cercana a la nominal. Dado que esta corriente está limitada únicamente por la resistencia eléctrica de la bobina, el voltaje de la fuente de CC debe ser bajo (típicamente 10 - 12 V).
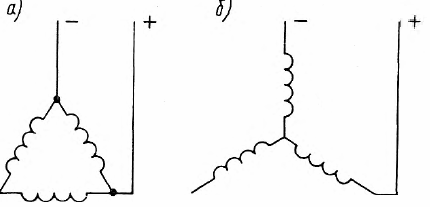
Arroz. 2. Conexión del estator de un motor de inducción a una fuente de CC en modo de frenado dinámico cuando se conecta en triángulo (a) y estrella (b)
La autoexcitación también se utiliza para el frenado dinámico. Los condensadores están conectados al estator desconectado de la red eléctrica.
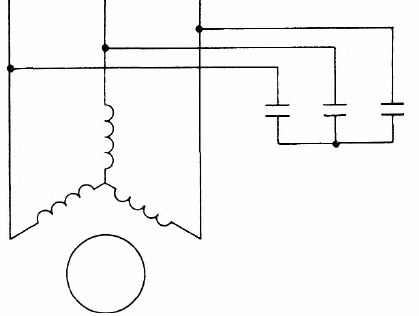
Arroz. 3. Esquema de frenado dinámico de un motor de inducción autoexcitado
A medida que el rotor gira, se crea un EMF en el circuito del estator debido a la magnetización residual y al flujo de corriente a través de los devanados del estator, así como a través de los capacitores.Cuando se alcanza una determinada velocidad en el circuito del estator, se producen condiciones resonantes: la suma de las resistencias inductivas será igual a la resistencia capacitiva. Comenzará un proceso intensivo de autoexcitación de la máquina, lo que conducirá a un aumento de EMF. El modo de autoexcitación terminará cuando la EMF de la máquina E y la caída de voltaje en los capacitores sean iguales.
El par de frenado máximo al aumentar la capacidad cambia a velocidades más bajas. Las desventajas del modo de frenado considerado son la aparición de la acción de frenado solo dentro de una determinada zona de velocidad y la necesidad de utilizar grandes condensadores para frenar a bajas velocidades.
En el lado positivo, no se requiere ninguna fuente adicional de energía eléctrica. Este modo se implementa siempre en instalaciones donde se conecta una batería de condensadores al motor para mejorar el factor de potencia de la red de alimentación.
Ver también sobre este tema: Circuitos de freno para motores asíncronos