Nodos de circuitos de control automático en función del tiempo.
 Los circuitos electromagnéticos, electrónicos, motores y electroneumáticos son muy utilizados en los circuitos de automatización. relé de tiempo... Los esquemas de conversión de duración de señal más comunes se muestran en la fig. 1. Diagrama fig. 1, y proporciona un pulso de cierta duración, independientemente de la duración de la pulsación botones SB. Después de presionar el botón SB, se activa el relé K, que da un impulso para encender el mecanismo. La duración del pulso está determinada por el tiempo de retardo del relé KT. El botón SB se puede reemplazar con un relé de comando KQ.
Los circuitos electromagnéticos, electrónicos, motores y electroneumáticos son muy utilizados en los circuitos de automatización. relé de tiempo... Los esquemas de conversión de duración de señal más comunes se muestran en la fig. 1. Diagrama fig. 1, y proporciona un pulso de cierta duración, independientemente de la duración de la pulsación botones SB. Después de presionar el botón SB, se activa el relé K, que da un impulso para encender el mecanismo. La duración del pulso está determinada por el tiempo de retardo del relé KT. El botón SB se puede reemplazar con un relé de comando KQ.
Diagramas Fig. 8, b (con relé de tiempo electromagnético) y fig. 1, c (con relé de tiempo electroneumático o motorizado) se utilizan para suministrar un pulso de corta duración después del inicio de la acción del interruptor de viaje SQ. En estos esquemas y posteriores, en lugar de contactos interruptor de movimiento Se pueden utilizar contactos de relé KQ.
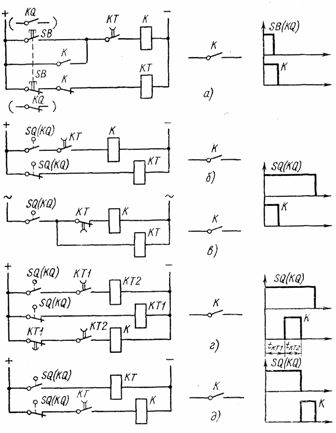
Arroz. 1. Circuitos para convertir la duración de las señales.
esquema fig.1d proporciona un pulso de duración tKT2 con un retardo de tiempo tKT1 después del inicio de la acción del interruptor SQ.
El nodo del circuito Fig. 1, e. Si se requiere un retardo de tiempo tKT1 antes de que se aplique este pulso, el circuito de la fig. 1, E. La duración del pulso es tKT2.
En los circuitos de control posicional, el circuito de la Fig. 1g, que cumple la función de dar una orden larga después del final del impacto en el interruptor de disparo SQ. El comando se cancela al comienzo de una nueva acción en el interruptor SQ.
Se puede obtener un breve retardo de tiempo (hasta 1,5 s) encendiendo y apagando de forma convencional relés intermedios debido a la derivación de sus bobinas con condensadores o diodos.
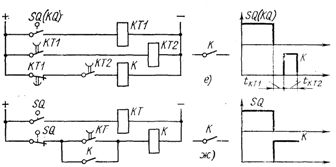
En el diagrama de la fig. 2, y cuando se cierra el contacto KQ, el relé K se activa con un retardo determinado por el tiempo de carga del condensador C. Cuando se cierra KQ, el relé K también vuelve con un retardo debido a la descarga del condensador.

Arroz. 2. Obtención de retardos de tiempo derivando las bobinas de los relés intermedios con condensadores o diodos.
Para obtener un retardo de tiempo solo cuando el relé está activado, utilice el circuito de la figura 1. 2, b. El retraso cuando se apaga el relé está prácticamente ausente, ya que el capacitor se descarga rápidamente a la resistencia R (la resistencia de la resistencia R es significativamente menor que la resistencia de la bobina del relé K). Un problema similar se resuelve con el circuito de la fig. 2c, que utiliza un contacto de apertura del relé KQ. La desventaja de este circuito es la pérdida significativa de energía a través de la resistencia en ausencia de señal.
El esquema de la fig. 2d, donde cuando se abre el contacto KQ, el relé K se apaga con un retardo de tiempo controlado por la resistencia R.
Según el diagrama de la fig. 2, e se crea un retardo de tiempo cuando K está apagado después de que se cierra el contacto del relé de comando KQ.
Si se requiere un ligero retraso en el retorno del relé K cuando se activa el relé de mando KQ, el diagrama de la fig. 2, e, en el que la bobina del relé K está desviada por un diodo.
El esquema para generar pulsos de una duración y ciclo de trabajo determinados se muestra en la fig. 3, un. La duración del pulso está determinada por el tiempo de retardo del relé KT2, la pausa está determinada por el tiempo de retardo del relé KT1.
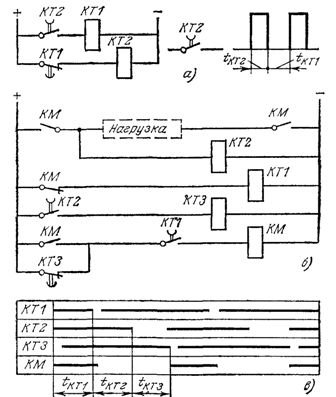
Arroz. 3. Circuitos de relés para generar pulsos.
En la Fig. 3, b, se proporciona un diagrama del encendido periódico del mecanismo con un tiempo de pausa prolongado. El tiempo de encendido del contactor KM es igual al retardo de tiempo del relé KT1, la duración de la pausa es la suma de los retrasos del relé KT2 y KTZ. El diagrama de tiempos se muestra en la Fig. 3, c.
Esquemas de generadores de pulsos de relés de tiempo o elementos lógicos (ver más abajo) también se utilizan para regular la velocidad de funcionamiento de los mecanismos lineales. El controlador de temperatura también se generalizó y contenía un dispositivo de comando KEP-12U, en muchos aspectos similar a un relé de sincronización del motor. La unidad tiene un motor ejecutivo, engranajes variables, tambor de leva, interruptor y 12 contactos.
Los reguladores de velocidad suelen utilizar el esquema para el funcionamiento cíclico del dispositivo KEP-12U (Fig. 4, a). El circuito se realiza utilizando los relés K1 y K2 y los contactos del dispositivo de comando KT.1 y KT.2, cuyo diagrama de circuito se muestra en la fig. 4, b.
Antes de comenzar a trabajar, encienda el interruptor S.Cuando el contacto del relé KQ se cierra brevemente, dando un comando para iniciar el ciclo de trabajo, el relé K1 se energiza y se bloquea automáticamente. El relé K2 se activa al encender el dispositivo de comando KT. Los devanados del motor LM1 y LM2 se energizan y el tambor de la leva comienza a girar. Los contactos de salida del dispositivo KT.3, KT.4, etc., que se cierran secuencialmente, en los momentos establecidos (ver el diagrama en la Fig. 4, b) dan comandos para encender los mecanismos lineales. En medio del ciclo, el contacto KT.1 se abre y el relé K1 se apaga.
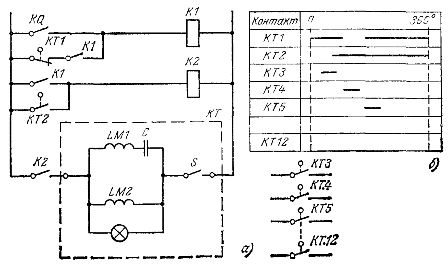
Figura 4. Controlador de velocidad de línea con el dispositivo KEP-12U
La bobina de relé K2 admite la fuente de alimentación a través del contacto del dispositivo KT.2. Después de girar el tambor en un ángulo de 360 °, el contacto KT.2 se abre, el motor del dispositivo KEP-12U se detiene. La cadena está lista para el próximo ciclo.
En conclusión, consideraremos dos esquemas para el control remoto del retardo de los relés de tiempo electromagnéticos.
Para cambiar el retraso desde el panel de control, puede usar un circuito de relé de dos bobinas con bobinas de disparo KT.1 y bobinas de retorno KT. 2 (desmagnetización), cuyos MDS están dirigidos de manera opuesta (Fig. 5, a). El MDS de la bobina de disparo se ajusta mediante el potenciómetro RP. Para evitar la operación repetida del TC después de que la inversión de magnetización regresa y se dispara, el MDS de la bobina de disparo debe ser menor que el MDS suficiente para tirar de la armadura, o se debe introducir su propio contacto de cierre del relé en la bobina del circuito (Fig. 5, a).
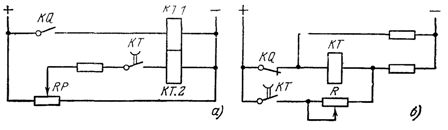
Figura 5. Esquemas para el ajuste remoto del retardo del relé de tiempo
Según el diagrama de la fig.5, b realice un cambio remoto en el retardo de tiempo de un relé de bobina simple. Cuando se abre el contacto KQ, la bobina del relé KT circula con una corriente de desmagnetización que está regulada por la resistencia R. A medida que aumenta la corriente de desmagnetización, el retardo del relé disminuye y viceversa. Con una tensión de alimentación de 220 V, se utiliza un relé con bobina para una tensión nominal de 110 V.