Circuitos de control automático para arranque y parada de motores DC
 El arranque de cualquier motor va acompañado de ciertos interruptores en el circuito de potencia y en el circuito de control. En este caso, se utilizan dispositivos de relé-contactor y sin contacto. Para motores DC para limitar corrientes de arranque Las resistencias de arranque están incluidas en el circuito del rotor y la armadura de los motores, que se apagan cuando los motores se aceleran en pasos. Cuando se completa el arranque, las resistencias de arranque se anulan por completo.
El arranque de cualquier motor va acompañado de ciertos interruptores en el circuito de potencia y en el circuito de control. En este caso, se utilizan dispositivos de relé-contactor y sin contacto. Para motores DC para limitar corrientes de arranque Las resistencias de arranque están incluidas en el circuito del rotor y la armadura de los motores, que se apagan cuando los motores se aceleran en pasos. Cuando se completa el arranque, las resistencias de arranque se anulan por completo.
El proceso de frenado de los motores también se puede automatizar. Tras la orden de paro, con la ayuda del equipo relé-contactor, se realizan las maniobras necesarias en los circuitos de potencia. Al acercarse a una velocidad cercana a cero, el motor se desconecta de la red. Durante el inicio, los pasos se apagan a intervalos regulares o según otros parámetros. Esto cambia la corriente y la velocidad del motor.
El control de arranque del motor se realiza en función de la EMF (o velocidad), la corriente, el tiempo y la ruta.
Subconjuntos y circuitos típicos para el control automático del arranque de motores de CC
El arranque de un motor de CC con excitación paralela o independiente se realiza con una resistencia introducida en el circuito del inducido. Se requiere una resistencia para limitar la corriente de entrada. A medida que el motor acelera, la resistencia de arranque se escalona. Cuando se completa el arranque, la resistencia se omitirá por completo y el motor volverá a sus características mecánicas naturales (Fig. 1). Al arrancar, el motor acelera según la característica artificial 1, luego 2 y, después de maniobrar la resistencia, según la característica natural 3.
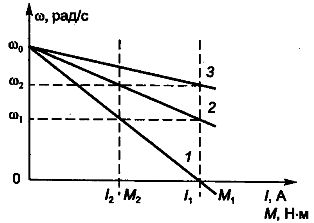
Arroz. 1. Características mecánicas y electromecánicas de un motor de CC con excitación paralela (ω — velocidad angular de rotación; I1 M1 — corriente máxima y par del motor; I2 M2 — corriente y momento de conmutación)
Considere el nodo del circuito de arranque del motor de CC (DCM) en la función EMF (Fig. 2).
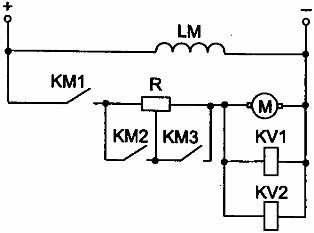
Arroz. 2. El nodo del circuito de arranque de DCT de excitación paralela en la función EMF
La función EMF (o velocidad) está controlada por relés, voltajes y contactores. Los relés de tensión están configurados para funcionar con diferentes valores de fem del inducido. Cuando se enciende el contactor KM1, el voltaje del relé KV en el momento del arranque no es suficiente para la operación. Cuando el motor acelera (debido al aumento de la fem del motor), se activa el relé KV1, luego KV2 (los voltajes de activación del relé tienen valores correspondientes); incluyen los contactores de aceleración KM2, KMZ, y las resistencias en el circuito del inducido están en derivación (los circuitos de conmutación del contactor no se muestran en el diagrama; LM es el devanado de excitación).
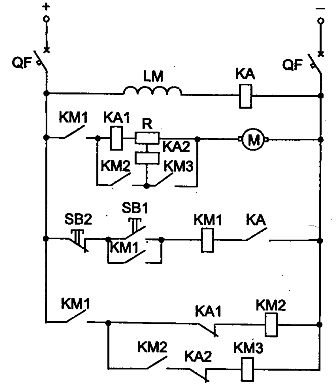
Veamos el esquema para arrancar un motor de CC en la función EMF (Fig. 3). La velocidad angular del motor a menudo se fija indirectamente, es decirmedir cantidades relacionadas con la velocidad. Para un motor de CC, dicho valor es el EMF. El inicio se lleva a cabo de la siguiente manera. El disyuntor QF se enciende, el campo del motor está conectado a la fuente de alimentación. El relé KA se activa y cierra su contacto.
Los demás dispositivos del circuito permanecen en su posición original. Para arrancar el motor, debe presiona el botón SB1 «Arranque», tras lo cual se activa el contactor KM1 y conecta el motor a la fuente de alimentación. El contactor KM1 es autoalimentado. El motor de CC se acelera con la resistencia R del circuito del inducido del motor.
A medida que aumenta la velocidad del motor, aumentan su fem y el voltaje en las bobinas de los relés KV1 y KV2. A la velocidad ω1 (ver Fig. 1.) se activa el relé KV1. Cierra su contacto en el circuito contactor KM2, que dispara y cortocircuita la primera etapa de la resistencia de arranque con su contacto. A la velocidad ω2 se activa el relé KV2. Con su contacto cierra el circuito de alimentación del contactor KMZ que, al ser accionado, con un contacto cortocircuita la segunda etapa de arranque de la resistencia de arranque. El motor alcanza sus características mecánicas naturales y termina el despegue.
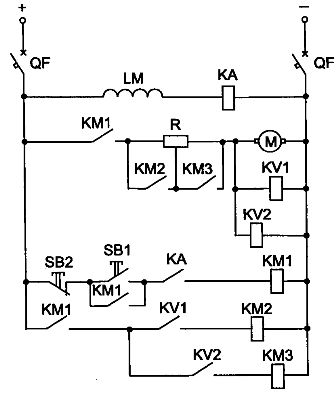
Arroz. 3. Esquema de inicio DCT de excitación paralela en la función EMF
Para el correcto funcionamiento del circuito, es necesario configurar el relé de tensión KV1 para que funcione a la FEM correspondiente a la velocidad ω1 y el relé KV2 para que funcione a la velocidad ω2.
Para detener el motor, presione el botón Stop SB2. Para desconectar el circuito eléctrico, abra el disyuntor QF.
La función de corriente está controlada por un relé de corriente. Considere el nodo del circuito de arranque del motor de CC en la función de flujo. En el diagrama que se muestra en la fig.4, se utilizan relés de sobrecorriente, que se activan en la corriente de entrada I1 y se desconectan en la corriente mínima I2 (ver Fig. 1). El tiempo de respuesta interno de los relés de corriente debe ser inferior al tiempo de respuesta del contactor.
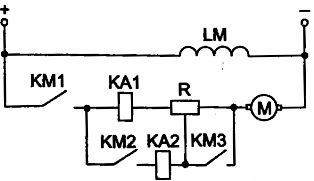
Arroz. 4. El nodo del circuito de arranque del DCT de excitación paralela dependiendo de la corriente
La aceleración del motor comienza con la resistencia completamente insertada en el circuito del inducido. A medida que el motor acelera, la corriente disminuye, con la corriente I2, el relé KA1 desaparece y con su contacto cierra el circuito de alimentación del contactor KM2, que desvía el primer contacto de la resistencia de arranque con su contacto. De manera similar, la segunda etapa de arranque de la resistencia está cortocircuitada (relé KA2, contactor KMZ). Los circuitos de alimentación del contactor no se muestran en el diagrama. Al final del arranque del motor, se puenteará la resistencia en el circuito del inducido.
Considere el circuito para arrancar un motor de CC como una función de flujo (Fig. 5). Las resistencias de los pasos de resistencia se seleccionan de modo que, en el momento en que se enciende el motor y se derivan los pasos, la corriente I1 en el circuito de armadura y el momento M1 no excedan el nivel permitido.
Arrancar un motor de corriente continua se realiza encendiendo el disyuntor QF y presionando el botón «Start» SB1. En este caso, el contactor KM1 se activa y cierra sus contactos. La corriente de irrupción I1 pasa a través del circuito de potencia del motor, bajo cuya influencia se activa el relé de sobrecorriente KA1. Su contacto se abre y el contactor KM2 no recibe alimentación.
Arroz. 5. Esquema del arranque del DCT de excitación en paralelo en función de la corriente
Cuando la corriente cae al valor mínimo I2, el relé de sobrecorriente KA1 cae y cierra su contacto.El contactor KM2 se activa ya través de su contacto principal deriva la primera sección de la resistencia de arranque y el relé KA1. Al cambiar, la corriente aumenta al valor I1.
Cuando la corriente aumenta nuevamente al valor de I1, el contactor KM1 no se enciende, porque su bobina está en derivación por el contacto KM2. Bajo la influencia de la corriente I1, el relé KA2 se activa y abre su contacto. Cuando en el proceso de aceleración la corriente vuelve a caer al valor de I2, cae el relé KA2 y se enciende el contactor KMZ. El arranque es completo, el motor funciona con sus características mecánicas naturales.
Para el correcto funcionamiento del circuito es necesario que el tiempo de respuesta de los relés KA1 y KA2 sea inferior al tiempo de respuesta de los contactores. Para detener el motor, presione el botón «Stop» SB2 y apague el disyuntor QF para desconectar el circuito.
El control de tiempo se logra utilizando un relé de tiempo y los contactores correspondientes que cortocircuitan las etapas de la resistencia con sus contactos.
Considere el nodo del circuito de arranque del motor de CC en función del tiempo (Fig. 6), el relé de tiempo KT se activa inmediatamente cuando aparece voltaje en el circuito de control a través del contacto de apertura KM1. Después de abrir el contacto KM1, el relé de tiempo KT pierde su fuente de alimentación y cierra su contacto con un retraso de tiempo. El contactor KM2 después de un intervalo de tiempo igual al retardo de tiempo del relé de tiempo recibe energía, cierra su contacto y deriva la resistencia en el circuito de armadura.
Arroz. 6. El nodo del circuito de arranque DCT de excitación paralela en función del tiempo.
Las ventajas del control en función del tiempo incluyen la facilidad de control, la estabilidad del proceso de aceleración y desaceleración, la falta de retraso del accionamiento eléctrico a velocidades intermedias.
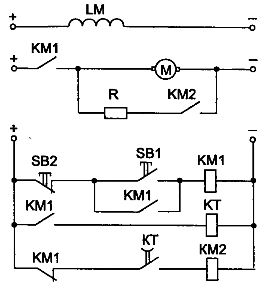
Considere el circuito para iniciar la excitación en paralelo de un motor de CC en función del tiempo. En la Fig. La figura 7 muestra un esquema de un motor de CC de excitación en paralelo de arranque irreversible. El lanzamiento se realiza en dos etapas. El circuito utiliza los botones SB1 «Start» y SB2 «Stop», contactores KM1 ... KMZ, relés de tiempo electromagnéticos KT1, KT2. El disyuntor QF se enciende. En este caso, la bobina del relé de tiempo KT1 recibe energía y abre su contacto en el circuito del contactor KM2. El motor se pone en marcha presionando el botón «Start» SB1. El contactor KM1 recibe energía y con su contacto principal conecta el motor a una fuente de energía con una resistencia en el circuito del inducido.
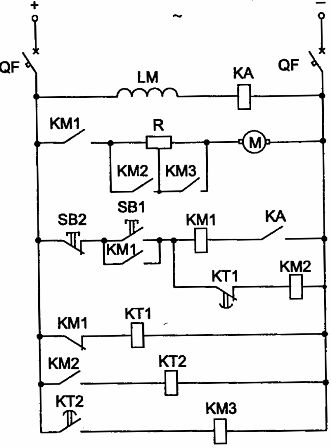
Arroz. 7. Esquema de arranque irreversible de un motor DC en función del tiempo
El relé de mínima corriente KA sirve para proteger el motor de la interrupción del circuito de excitación. Durante la operación normal, el relé KA se energiza y su contacto en el circuito del contactor KM1 se cierra, preparando el contactor KM1 para la operación. Cuando se rompe el circuito de excitación, el relé KA se apaga, abre su contacto, luego el contactor KM1 se apaga y el motor se detiene. Cuando se acciona el contactor KM1, su contacto de bloqueo se cierra y se abre el contacto KM1 en el circuito de relé KT1, que se apaga y cierra su contacto con un tiempo de retardo.
Después de un intervalo de tiempo igual al tiempo de retardo del relé KT1, se cierra el circuito de alimentación del contactor acelerador KM2, que se dispara y con su contacto principal cortocircuita una etapa de la resistencia de arranque. Al mismo tiempo, se activa el relé de tiempo KT2. El motor acelera. Después de un intervalo de tiempo igual al retraso del relé KT2, el contacto KT2 se cierra, el contactor de aceleración KMZ se activa y con su contacto principal contacta la segunda etapa de la resistencia de arranque en el circuito de armadura. El arranque es completo y el motor vuelve a sus características mecánicas naturales.
Unidades de circuito de control de freno de CC típicas
Los sistemas de control automático de motores de CC utilizan frenado dinámico, frenado opuesto y frenado regenerativo.
En el frenado dinámico, es necesario cerrar el devanado del inducido del motor a una resistencia adicional y dejar energizado el devanado de excitación. Este frenado se puede realizar en función de la velocidad y en función del tiempo.
El control en función de la velocidad (EMF) durante el frenado dinámico se puede realizar de acuerdo con el esquema que se muestra en la fig. 8. Cuando se apaga el contactor KM1, la armadura del motor se desconecta de la red, pero hay tensión en sus terminales en el momento de la desconexión. El relé de voltaje KV opera y cierra su contacto en el circuito del contactor KM2, que con su contacto cierra la armadura del motor a la resistencia R.
A velocidades cercanas a cero, el relé KV pierde potencia. Se produce una mayor desaceleración desde la velocidad mínima hasta la parada total bajo la acción de un momento estático de resistencia.Para aumentar la eficiencia de frenado, se pueden aplicar dos o tres etapas de frenado.
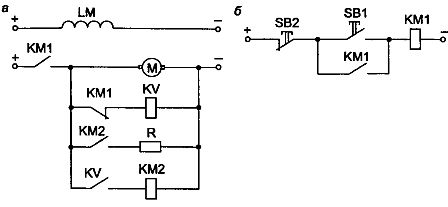
Arroz. 8. Nodo del circuito para el control automático del frenado dinámico en la función EMF: a — circuito de potencia; b- circuito de control
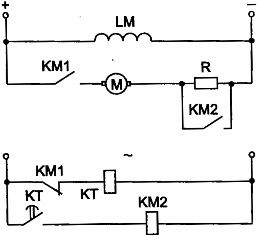
El frenado dinámico con excitación independiente del motor constante en función del tiempo se lleva a cabo de acuerdo con el esquema que se muestra en la fig. nueve.
Arroz. 9. Nodo del circuito de frenado dinámico DCT de excitación independiente en función del tiempo
Cuando el motor está en marcha, el relé de tiempo KT está activado, pero el circuito del contactor de freno KM2 está abierto. Para detener, debe presionar el botón "Stop" SB2. El contactor KM1 y el relé de tiempo KT pierden potencia; el contactor KM2 se activa porque el contacto KM1 en el circuito del contactor KM2 se cierra y el contacto del relé de tiempo KT se abre con un retardo de tiempo.
Para la sincronización del relé de tiempo, el contactor KM2 recibe energía, cierra su contacto y conecta la armadura del motor a la resistencia adicional R. Se realiza una parada dinámica del motor. Al final, el relé KT, después de un tiempo, abre su contacto y desconecta el contactor KM2 de la red. El frenado adicional hasta una parada completa se lleva a cabo bajo la influencia del momento de resistencia de la Sra.
En el frenado de acción inversa, la FEM del motor y la tensión de red actúan de acuerdo. Para limitar la corriente, se inserta una resistencia en el circuito.
Control de excitación de motores DC
El devanado de campo del motor tiene una inductancia significativa y si el motor se apaga rápidamente, puede aparecer una gran tensión en él, lo que hará que se rompa el aislamiento del devanado. Para evitar esto, puede usar los nodos del circuito que se muestran en la fig.10. La resistencia de extinción se enciende en paralelo con la bobina de excitación a través del diodo (Fig. 10, b). Por lo tanto, después de apagar, la corriente pasa a través de la resistencia por un corto tiempo (Fig. 10, a).

Arroz. 10. Nodos de circuitos para encender resistencias de extinción: a — la resistencia de extinción está conectada en paralelo; b — la resistencia de extinción se enciende a través del diodo.
La protección contra la interrupción del circuito de excitación se realiza mediante un relé de mínima corriente según el esquema que se muestra en la fig. once.

Arroz. 11. Protección contra interrupción del circuito de excitación: a — circuito de excitación de potencia; b- circuito de control
En caso de rotura de la bobina de excitación, el relé KA se desactiva y desconecta el circuito del contactor KM.