Cadenas de transmisión del transportador
 El artículo examina los esquemas de accionamiento eléctrico de algunos transportadores. En la Fig. 1 muestra un diagrama esquemático del accionamiento eléctrico de líneas transportadoras individuales, cuyas velocidades deben ser estrictamente las mismas. Tal necesidad surge en la producción continua, cuando diferentes productos, después de las operaciones tecnológicas necesarias en líneas separadas, deben encontrarse en el sitio de ensamblaje en estricta conformidad entre sí.
El artículo examina los esquemas de accionamiento eléctrico de algunos transportadores. En la Fig. 1 muestra un diagrama esquemático del accionamiento eléctrico de líneas transportadoras individuales, cuyas velocidades deben ser estrictamente las mismas. Tal necesidad surge en la producción continua, cuando diferentes productos, después de las operaciones tecnológicas necesarias en líneas separadas, deben encontrarse en el sitio de ensamblaje en estricta conformidad entre sí.
El esquema le permite iniciar y detener simultáneamente varias líneas transportadoras y ajustar su velocidad. El movimiento coordinado se logra cambiando los motores de acuerdo con el esquema de eje síncrono con un convertidor de frecuencia inversor común. El control de velocidad de los motores D1 y D2 se realiza modificando la velocidad del inversor mediante una caja de cambios de relación variable P.
El permiso para iniciar los transportadores lo otorgan los operadores que supervisan el funcionamiento de los transportadores en las áreas más críticas. Cuando se presionan los botones de listo G1 y G2, las luces de señal LS1 y LS2 se encienden y los relés RG1 y RG2 se activan. Estos últimos preparan el relevo para iniciar el RP.
Cuando presiona el botón Inicio, se activa el RP, que enciende el contactor L1. Hay sincronización monofásica de la posición del inversor, D1 y D2. Después de retardos de tiempo, los relés de péndulo integrados en los contactores L1 y L2 encienden L2, apagan L1 y encienden LZ alternativamente. El arranque del reóstato del motor del convertidor de frecuencia se realiza según el principio del tiempo (relés de tiempo RU1, RU2, RUZ).
En la Fig. 2 muestra un diagrama del accionamiento eléctrico de la escalera mecánica del metro, que le permite trabajar en la subida y bajada de pasajeros. Como motor de accionamiento se utiliza un motor asíncrono con un rotor de fase con una potencia de hasta 200 kW. En determinados momentos del día, con un flujo de pasajeros insignificante, la escalera mecánica puede funcionar casi al ralentí durante mucho tiempo.
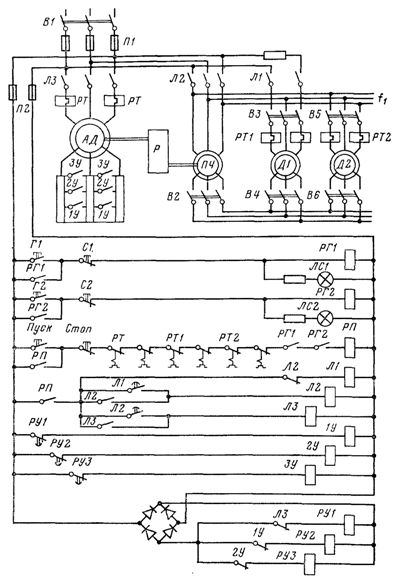
Arroz. 1. Esquema del accionamiento eléctrico de líneas transportadoras con movimiento coordinado.
Para aumentar el factor de potencia y la eficiencia del motor, cuando la carga del eje se reduce a aproximadamente el 40 % de la nominal, el devanado del estator se cambia de triángulo a estrella. A medida que aumenta la carga, vuelve a convertirse en el triángulo.
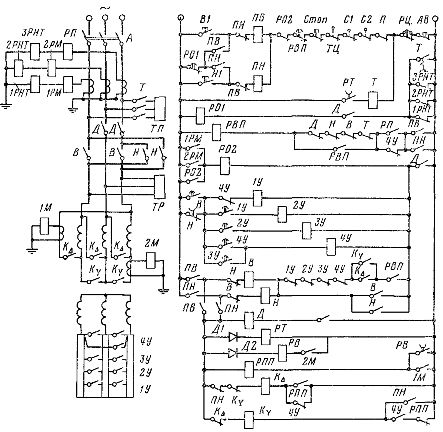
Arroz. 2. Esquema del accionamiento eléctrico de la escalera mecánica del metro.
Dicha conmutación la realizan automáticamente los relés de sobrecorriente 1M y 2M, los cuales controlan los contactores k∆ y kY a través de los relés RPP y РВ. El contacto RV de retardo de apertura asegura la presencia del circuito de la bobina RPP en el período entre 2M apagado y 1M encendido.
En el modo de descenso del generador a plena carga, el motor se carga significativamente menos (debido a pérdidas mecánicas de la instalación) que con una carga similar en el modo de ascenso.Por lo tanto, en el modo de caída, el devanado del estator del motor siempre está conectado en estrella. El motor arranca en función del tiempo utilizando relés de péndulo en los contactores del acelerador 1U-4U. El tope es mecánico. En este caso, el freno de servicio TP se instala en el eje del motor y el TP de seguridad se instala en el eje del engranaje impulsor para garantizar que la escalera se detenga si se rompe la conexión mecánica entre el engranaje y los ejes del motor.
El circuito implementa los enclavamientos de seguridad típicos descritos en la sección anterior: desde un mal funcionamiento de la parte mecánica del equipo — eliminación de cadenas y pasamanos (interruptores de límite TC, P), violación de la estructura de los pasos (interruptores de límite C1 y C2 ), temperatura excesiva de los cojinetes (relé térmico 7), por sobrevelocidad (relé de velocidad centrífugo RC).
Además, se proporciona protección del motor: máxima (relé 1RM, 2RM), de sobrecarga (relé RP), de pérdida de potencia del motor (relé de corriente cero 1RNT, 2RNT, 3RNT), de soldadura de los contactos de cierre de los contactores de potencia (contactos de apertura D, Y, B, T en bobina circuito RVP y 1U-4U en bobina circuito B).
La protección contra pérdida de potencia, sobrecalentamiento de rodamientos y sobrecarga del motor opera con un retardo de tiempo determinado por el relé de tiempo PO1 y RVP. Todas las protecciones, excepto el relé de velocidad del mando a distancia, paran el motor desconectándolo de la red y aplicando el freno de servicio TP. Solo al final del proceso de frenado, una vez transcurrido el retardo del relé PT, se acciona adicionalmente el freno de seguridad TP.Cuando se activa el relé de velocidad RC o se presiona el botón de parada de emergencia, ambos frenos se aplican simultáneamente.