Automatización de bombas y estaciones de bombeo
La automatización de las unidades de bombeo permite aumentar la confiabilidad y continuidad del suministro de agua, reducir los costos de mano de obra y operación, así como el tamaño de los tanques de control.
Para la automatización de unidades de bombeo, con excepción de los equipos de propósito general (contactores, arrancadores magnéticos, interruptores, relés intermedios), se utilizan dispositivos especiales de control y monitoreo, por ejemplo, relé de control de nivel, relés de control de llenado de bomba centrífuga, relé de chorro, interruptores de flotador, interruptores de nivel de electrodo, varios manómetros, sensores capacitivos, etc.

Estación de control: un dispositivo completo de hasta 1 kV, diseñado para el control remoto de instalaciones eléctricas o sus partes con desempeño automatizado de funciones de control, regulación, protección y señalización. Estructuralmente, la estación de control es un bloque, panel, gabinete, tablero.
Unidad de control: una estación de control, cuyos elementos están montados en una placa o marco separado.
Panel de control: una estación de control, cuyos elementos están montados en tableros, rieles u otros elementos estructurales ensamblados en un marco común o lámina de metal.
Panel de control (ShTSU control station shield) Es un conjunto de varios paneles o bloques sobre un marco tridimensional.
Gabinete de control: una estación de control protegida por todos lados de tal manera que cuando las puertas y cubiertas están cerradas, se excluye el acceso a las partes activas.
La automatización de bombas y estaciones de bombeo, por regla general, se reduce al control de la bomba eléctrica sumergible desde el nivel del agua en el tanque o la presión en la tubería de presión.
Veamos ejemplos de automatización de unidades de bombeo.
En la Fig. 1, y muestra un esquema de automatización de la unidad de bomba más simple: la bomba de drenaje 1, y en la fig. 1, b muestra el diagrama de circuito de esta instalación. La automatización de la unidad de bombeo se realiza mediante un interruptor de nivel flotante. La llave de control KU tiene dos posiciones: para control manual y automático.
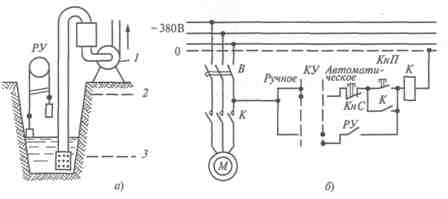
Arroz. 1. El diseño del dispositivo de bombeo de drenaje (a) y su circuito eléctrico para la automatización (b)
En la Fig. 2 esquema de automatización de transmisión para controlar una bomba sumergible según el nivel de agua en el tanque de una torre de agua, implementado en elementos de contacto de relé.
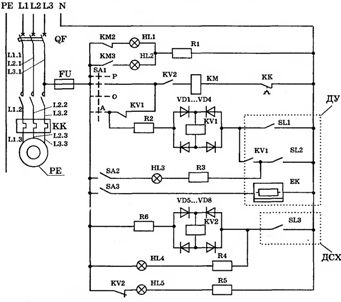
Arroz. 2. Diagrama esquemático de automatización de una bomba sumergible según el nivel de agua en el tanque-torre de agua
El modo de funcionamiento del circuito de automatización de la bomba se establece mediante el interruptor CA1. Cuando lo coloca en la posición "A" y enciende el interruptor QF, se aplica voltaje al circuito de control.Si el nivel de agua en el tanque de presión está por debajo del electrodo del nivel inferior del sensor de control remoto, entonces los contactos SL1 y SL2 en el circuito están abiertos, el relé KV1 está apagado y sus contactos en el circuito de la bobina del arrancador magnético KM están cerrados. En este caso, el arrancador magnético encenderá el motor de la bomba, al mismo tiempo, la lámpara de señal H se apagará L1 y la lámpara H se encenderá L2. La bomba suministrará agua al tanque bajo presión.
Cuando el agua llene el espacio entre el electrodo de nivel inferior SL2 y el cuerpo del sensor conectado al cable neutro, el circuito SL2 se cerrará, pero el relé KV1 no se encenderá porque sus pines en serie con SL2 están abiertos.
Cuando el agua llegue al electrodo de nivel más alto, el circuito SL1 se cerrará, el relé KV1 se encenderá y, habiendo abierto sus contactos en el circuito de la bobina del arrancador magnético KM, apagará este último, y después de cerrar los contactos de cierre, se energizará solo a través del circuito del sensor SL2. El motor de la bomba se apagará y la lámpara de advertencia H se apagará. L2 y la lámpara H se encenderán L1. El motor de la bomba se encenderá nuevamente cuando el nivel del agua baje a la posición cuando el circuito SL2 esté abierto y el relé KV1 se desactivará.
Solo es posible encender la bomba en cualquier modo si el circuito del sensor de funcionamiento en seco DSX está cerrado (SL3), que controla el nivel de agua en el pozo.
La principal desventaja del control de nivel es la susceptibilidad de los electrodos de los sensores de nivel a congelarse en invierno, por lo que la bomba no se apaga y el agua se desborda del tanque. Hay casos de destrucción de torres de agua debido a la congelación de una gran masa de hielo en su superficie.
Cuando se controla el funcionamiento de la bomba por presión, se puede instalar un manómetro de contacto eléctrico o un interruptor de presión en la línea de presión en la sala de bombas. Esto facilita el mantenimiento del sensor y elimina la exposición a bajas temperaturas.
En la Fig. 3 esquema de circuito de transmisiones del control de una instalación de suministro de agua (bombeo) de una torre según las señales de un manómetro de contacto eléctrico (según la presión).
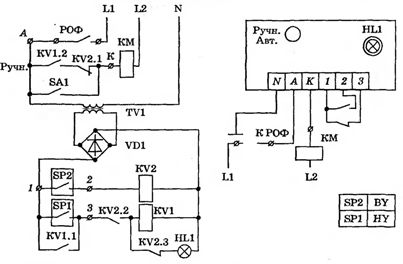
Arroz. 3. Diagrama esquemático del control de una instalación de agua en una torre mediante un manómetro de contacto eléctrico
Si no hay agua en el tanque, el contacto del manómetro СП1 (nivel inferior) está cerrado y el contacto СП2 (nivel superior) está abierto. El relé KV1 funciona, cerrando los contactos KV1.1 y KV1.2, como resultado de lo cual se enciende el arrancador magnético KM, que conecta la bomba eléctrica a una red trifásica (los circuitos de alimentación no se muestran en el diagrama).
La bomba suministra agua al tanque, la presión aumenta hasta que se cierra el contacto del manómetro, СП2 se establece en el nivel superior del agua. Después de cerrar el contacto СP2, se activa el relé K V2, que abre los contactos KV2.2 en el circuito de la bobina del relé KV1 y KV2.1 en el circuito de la bobina del arrancador magnético KM; el motor de la bomba se apaga.
Cuando sale agua del tanque, la presión disminuye, СP2 se abre, cortando KV2, pero la bomba no se enciende, ya que el manómetro está en contacto, СP1 está abierto y la bobina de relé KV1 está apagada. La bomba se enciende cuando el nivel de agua en el tanque desciende antes de que se cierre el contacto del manómetro. СП1.
Los circuitos de control son alimentados por un transformador reductor de 12 V, lo que aumenta la seguridad al realizar el mantenimiento del circuito de control y el manómetro de contacto eléctrico.
Para garantizar el funcionamiento de la bomba en caso de mal funcionamiento del manómetro de contacto eléctrico o del circuito de control, se diseña un interruptor CA1. Cuando se enciende, los contactos de control KV1.2, KV2.1 se manipulan y la bobina del arrancador magnético KM se conecta directamente a la red de 380 V.
En el desfase L1, el circuito de control incluye un contacto ROF (relé de pérdida de fase), que se abre en caso de fase abierta o modo asimétrico de la red de alimentación. En este caso, el circuito de la bobina KM se rompe y la bomba se apaga automáticamente hasta que se solucione la falla.
La protección de los circuitos de alimentación en este circuito contra sobrecargas y cortocircuitos se realiza mediante un interruptor automático.
En la Fig. 4 esquema de transmisión para la automatización de una instalación de bombeo de agua, que contiene una unidad de bomba eléctrica 7 de tipo sumergible, ubicada en un pozo 6. Una válvula de retención 5 y un medidor de flujo 4 están instalados en la tubería de presión.
El grupo motobomba dispone de un depósito de presión 1 (torre de agua o caldera aire-agua) y Sensores de presión (o nivel) 2, 3, con el sensor 2 respondiendo a la presión superior (nivel) en el tanque y el sensor 3 a la presión inferior (nivel) en el tanque. La estación de bombeo está controlada por la unidad de control 8.
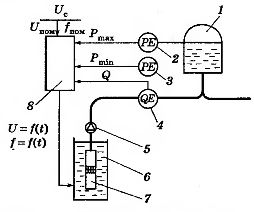
Arroz. 4. Esquema para la automatización de un dispositivo de bombeo de agua con una frecuencia variable
La unidad de bomba se controla de la siguiente manera. Suponga que la unidad de bomba se apaga y la presión en el tanque de presión disminuye y se vuelve inferior a Pmin... En este caso, se envía una señal desde el sensor para encender la bomba eléctrica. Comienza aumentando gradualmente la frecuencia. es la corriente que alimenta el motor eléctrico de la unidad de bombeo.
Cuando la velocidad de la unidad de bomba alcance el valor establecido, la bomba entrará en el modo de funcionamiento. Programando el modo de funcionamiento convertidor de frecuencia puede garantizar la intensidad necesaria del trabajo de la bomba, su arranque y parada suaves.
El uso de un accionamiento eléctrico ajustable de una bomba sumergible permite implementar sistemas de suministro de agua de flujo directo con mantenimiento automático de la presión en la red de suministro de agua.
La estación de control, que garantiza un arranque y parada suaves de la electrobomba, el mantenimiento automático de la presión en la tubería, contiene un convertidor de frecuencia A1, un sensor de presión BP1, un relé electrónico A2, un circuito de control y elementos auxiliares que aumentan la fiabilidad. de equipos electrónicos (Fig. 5).
El circuito de control de la bomba y el convertidor de frecuencia proporcionan las siguientes funciones:
— arranque y parada suaves de la bomba;
— control automático por nivel o presión;
— protección contra el "funcionamiento en seco";
— apagado automático de la bomba eléctrica en caso de modo de fase incompleta, caída de voltaje inaceptable, en caso de emergencia en la red de suministro de agua;
— protección contra sobretensión en la entrada del convertidor de frecuencia A1;
— señalización para el encendido y apagado de la bomba, así como para los modos de emergencia;
— calentamiento del armario de control a temperaturas negativas en la sala de bombas.
El arranque suave y la desaceleración suave de la bomba se realizan utilizando un convertidor de frecuencia tipo A1 FR-E-5.5k-540ES.
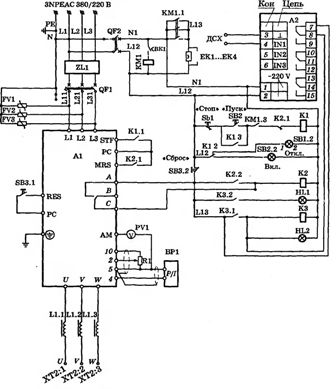
Arroz. 5. Diagrama esquemático de automatización de una bomba sumergible con un dispositivo para arranque suave y mantenimiento automático de presión.
El motor de la bomba sumergible está conectado a los terminales U, V y W del convertidor de frecuencia. Cuando se presiona el botón СB2, se activa el relé «Inicio» K1, cuyo contacto K1.1 conecta las entradas STF y la computadora del convertidor de frecuencia, lo que garantiza un arranque suave de la bomba eléctrica de acuerdo con el programa especificado al configurar el convertidor de frecuencia.
En caso de falla en el convertidor de frecuencia o en los circuitos del motor de la bomba, el circuito del convertidor de CA se cierra, asegurando la operación del relé K2. Después de la activación de K2, sus contactos K2.1, K2.2 se cierran y se abre el contacto K2.1 en el circuito K1. La salida del convertidor de frecuencia y el relé K2 están desconectados. La reactivación del circuito es posible solo después de que se haya eliminado la falla y se haya reiniciado la protección con el botón 8V3.1.
El sensor de presión BP1 con salida analógica 4 … 20 mA está conectado a la entrada analógica del convertidor de frecuencia (pines 4, 5), proporcionando retroalimentación negativa en el sistema de estabilización de presión.
El funcionamiento del sistema de estabilización está garantizado por el controlador PID del convertidor de frecuencia. La presión requerida se establece mediante el potenciómetro K1 o mediante el panel de control del convertidor de frecuencia. Cuando la bomba funciona en seco, el contacto 7-8 del relé de resistencia electrónica A2 se cierra en la bobina del relé de cortocircuito y el sensor de funcionamiento en seco se conecta a sus contactos 3-4.
Después de que se activa el relé de cortocircuito, sus contactos K3.1 y cortocircuito.2 se cierran, como resultado de lo cual se activa el relé de protección K2, lo que asegura que el motor de la bomba se apague. En este caso, el relé de cortocircuito se alimenta de forma independiente a través del contacto K3.1.
En todos los modos de emergencia, la lámpara HL1 se enciende; la lámpara HL2 se enciende cuando el nivel del agua es inaceptablemente bajo (con «funcionamiento en seco» de la bomba) El calentamiento del armario de control en la estación fría se realiza con la ayuda de los calentadores eléctricos EK1 … EK4, que se encienden por el contactor KM1 cuando el relé térmico VK1. La protección de los circuitos de entrada del convertidor de frecuencia contra cortocircuitos y sobrecargas la realiza el disyuntor QF1.

Arroz. 5. Automatización de la unidad de bombeo
El artículo utiliza materiales del libro Daineko V.A. Equipos eléctricos de empresas agrícolas.
Ver también: Un esquema de control automatizado simple para dos bombas de desechos