Clasificación de los sistemas de control automático.

El conjunto de dispositivos de control automático y objetos de control conectados e interactuando entre sí de acuerdo con el algoritmo de control se denomina sistema de control automático (ACS).
Los sistemas de control automático se pueden clasificar según el método de control y las características funcionales. Según el método de control, todos los sistemas se dividen en dos grandes clases: ordinarios (no autorreguladores) y autorreguladores (adaptativos).
Los sistemas ordinarios pertenecientes a la categoría simple no cambian su estructura en el curso de la gestión. Son los más desarrollados y ampliamente utilizados en fundiciones y talleres térmicos. Los sistemas de control automático comunes se dividen en tres subclases: sistemas de control abiertos, cerrados y combinados.
Los sistemas de control automático de bucle abierto, a su vez, se dividen en sistemas de control rígido automático (SZHU) y sistemas de control de perturbaciones.
En los primeros sistemas, el regulador actúa sobre el objeto de control independientemente del resultado obtenido, es decir, del valor de la variable controlada y de la perturbación externa. Los sistemas de control de perturbaciones funcionan según el principio de que la acción de control se genera en función de las perturbaciones externas que afectan al objeto de control.
Como ejemplo, considere el sistema de calefacción de una fundición o taller térmico. En este caso, el consumo de agua caliente en la tubería de calefacción de la tienda depende de las condiciones climáticas externas. Cuanto más frío hace en el exterior, más agua caliente se suministra a los radiadores y viceversa.
Los sistemas de control automático cerrados que funcionan según el principio de desviación también se denominan sistemas de control automático (ACS). Su característica distintiva es la presencia de un ciclo cerrado de paso de señal, es decir, la presencia de un canal de retorno a través del cual se transmite información sobre el estado de la variable controlada a la entrada del elemento de comparación.
Los sistemas de control automático están diseñados para resolver tres problemas: estabilización del valor controlado (STAbilizing ATS), cambio del valor controlado según programas conocidos (ATS programados) o desconocidos (ATS de seguimiento).
En la estabilización ATS, el punto de consigna de la variable controlada es constante. Un ejemplo de tal sistema es el sistema de control de temperatura en el espacio de trabajo de un horno térmico. En el software ATS, el valor de la variable controlada cambia con el tiempo según un programa prediseñado (conocido).
En los servosistemas, el valor establecido de la variable controlada cambia con el tiempo de acuerdo con un programa previamente desconocido.Los ATS de seguimiento y software difieren de los estabilizadores en el principio de procesamiento de la señal de referencia.
El ejemplo más típico de servocontrol es el mantenimiento automático de una determinada relación entre el consumo de combustible y aire al regular el proceso de combustión en hornos de fusión y calentamiento de combustible.
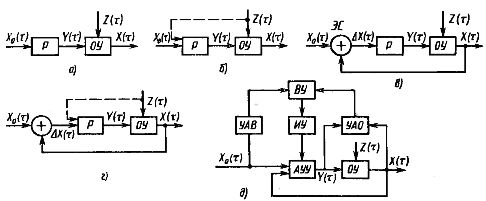
Sistemas de control automático: a — abierto, b — polarizado abierto, c — cerrado, d — combinado, d — autorregulador, P — controlador, OU — objeto de control, ES — elemento de comparación, UAV — dispositivo para el análisis de la acción de control : VU: dispositivo informático, IU es un dispositivo ejecutivo, AUU es un dispositivo de control automático, AUO es un dispositivo de análisis de objetos de control.
Los sistemas combinados combinan las ventajas de los sistemas de control de desviación y perturbaciones, lo que aumenta la precisión del control. El efecto de las perturbaciones no contabilizadas en los sistemas combinados se compensa o atenúa mediante el control de polarización.
Los sistemas de autorregulación (adaptativos) se pueden dividir en tres subclases: sistemas extremos, sistemas de autoajuste y sistemas de autoajuste.
Los sistemas de regulación extrema se denominan sistemas de estabilización, seguimiento o control programado en los que la configuración, el programa o la ley de reproducción cambian automáticamente según los cambios en las condiciones externas o el estado interno del sistema para crear el modo de operación más favorable (óptimo) de un objeto de control.
En dichos sistemas, en lugar de un escenario o programa permanente, se instala un dispositivo de búsqueda automática, que analiza cada característica del objeto (eficiencia, productividad, economía, etc.) y, en función del resultado obtenido, proporciona el valor requerido de un variable controlada al dispositivo de control, por lo que esta característica tiene un valor sobresaliente con un cambio continuo en varias influencias perturbadoras que afectan las condiciones de operación del sistema.
En los sistemas con parámetros de ajuste automático, cuando cambian las condiciones externas o las características del objeto controlado, se produce un cambio automático (no según un programa predeterminado) en los parámetros variables del dispositivo de control para garantizar un funcionamiento estable del sistema y mantener el valor controlado en un nivel dado u óptimo.
En los sistemas con una estructura autoajustable, cuando cambian las condiciones externas y las características del objeto de control, los elementos en el esquema de conexión se cambian o se introducen nuevos elementos. El propósito de estos cambios (elección) de la estructura es lograr una mejor solución al problema de gestión.
La selección de la estructura se realiza mediante búsqueda automática mediante operaciones computacionales y lógicas. Dichos sistemas no solo deben adaptarse a todos los cambios en las condiciones externas y características del objeto, sino que también deben funcionar normalmente incluso en presencia de fallas o daños en elementos individuales, creando nuevos circuitos para reemplazar los rotos. Los sistemas de autorregulación se pueden hacer para mejorar, "ganar experiencia" probando rápidamente varias opciones, eligiendo y "recordando" la mejor.
Clasificación funcional Todos los sistemas de control automático se dividen en cuatro clases:
-
sistemas para coordinar el trabajo de los mecanismos,
-
sistemas para regular los parámetros de los procesos tecnológicos,
-
sistemas de control automático,
-
sistemas automáticos de protección y bloqueo.

Sistemas diseñados para coordinar la operación de mecanismos individuales de la planta o la planta en su conjunto, sistemas de control rígido automático (SZHU).
Los procesos tecnológicos de los sistemas de control automático (ACS) aseguran el mantenimiento del valor controlado en un nivel dado o su cambio de acuerdo con un programa dado.
Los sistemas de control automático (ACS) contienen medios y métodos para obtener información sobre los valores actuales de los parámetros del proceso tecnológico (temperatura, presión, contenido de polvo o gas en el aire, etc.) sin intervención humana directa.
Los sistemas de protección automática (SAZ) y los sistemas de bloqueo (SAB) previenen la ocurrencia de situaciones de emergencia cuando los equipos operan en un estado estable.