Electroimanes de freno para grúas
 Electroimanes de freno diseñados para controlar frenos mecánicos. A su vez, estos frenos sirven para detener los mecanismos de la grúa en una determinada posición o limitar la distancia de frenado en caso de fuga con el motor de accionamiento apagado.
Electroimanes de freno diseñados para controlar frenos mecánicos. A su vez, estos frenos sirven para detener los mecanismos de la grúa en una determinada posición o limitar la distancia de frenado en caso de fuga con el motor de accionamiento apagado.
Los frenos de zapata y de banda son los más utilizados para mecanismos de grúas (si es necesario, tengan momentos de frenado superiores a 10 kN NS m): resorte y, a veces, carga. Los frenos de disco se utilizan con menos frecuencia (momento de frenado de hasta 1 kN x m) y cónicos (momento de frenado de hasta 50 N NS m).
Las bobinas de los electroimanes del freno se encienden simultáneamente con el motor eléctrico y liberan el freno. Cuando se apaga el motor eléctrico, las bobinas del solenoide del freno se desairean simultáneamente y se produce el frenado: el freno se aprieta bajo la acción de un resorte o una carga.
Los electroimanes de freno con corriente alterna se utilizan para frenos de mecanismos de grúas: serie KMT trifásica (Fig. 1) de carrera larga (carrera máxima del inducido de 50 a 80 mm), serie MO monofásica (Fig.2)-carrera corta (carrera de la barra de freno de 3 a 4 mm), corriente continua: series KMP y VM — carrera larga (carrera del inducido de 40 a 120 mm), serie MP (Fig. 3) — carrera corta (carrera de anclaje) de 3 a 4,5 mm).
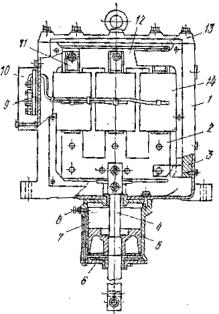
Arroz. 1. Electroimán de freno de la serie KMT: 1 — carcasa, 2 — ancla, 3 — guías, 4 — varilla, 5 — pistón, 6 ~ cubierta del amortiguador, 7 — cilindro del amortiguador, 8 — tornillo de ajuste de compresión, 9 — bloque de terminales, 10 — cubierta del bloque de terminales, 11 — soportes de bobina de latón, 12 — yugo, 13 — cubierta, 14 — bobina
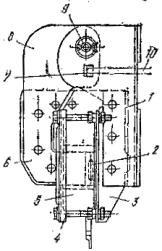
Arroz. 2. Electroimán de freno de la serie MO: 1 — yugo fijo, 2 — cortocircuito, 3 — cuadrado, 4 — cubierta, 5 — bobina, .6 — armadura, 7 — tira, 8 — mejilla, 9 — eje, 10 — empuje
Los principales parámetros de los electroimanes de freno con inducido de movimiento de traslación (KMT, KMP, VM y MP) son la fuerza de tracción y la carrera del inducido, y para los electroimanes de válvulas de la serie MO, el momento del electroimán y el ángulo de rotación del inducido.
Los solenoides de freno de todas las series anteriores son independientes electrodomésticosarticulado con frenos.
Frenos de zapata de la serie TS con electroimanes de carrera corta y botes de freno de resorte TKP (ver Fig. 3) con bobinas de CC incorporadas. Para estos frenos, la palanca 1 se moldea junto con la carcasa del solenoide y la armadura del solenoide se funde con la palanca.
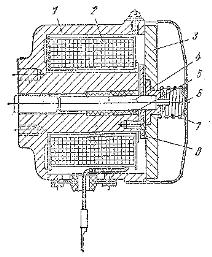
Arroz. 3. Electroimán de freno de la serie MP: 1 — cuerpo, 2 — bobina, 3 — inducido, 4 — pasador, 5 — estos otolitos y casquillos, 6 — tapa, 7 — resorte amortiguador, 8 — polo
Las bobinas de los solenoides de freno de CA están conectadas en paralelo y están diseñadas para el voltaje de línea completo. Cuando se encienden, se produce un choque de corriente significativo: para electroimanes de la serie KMT Azstart = (10-30) Aznumer, serie MO — Azstart = (5-6) AzNo.
Al seleccionar dispositivos de protección como fusibles, se debe tener en cuenta la corriente de irrupción. La corriente de arranque está determinada por las fórmulas.
Azstart = Cp / √3U
para electroimanes trifásicos
Istart = Sp / U
donde, CNS — plena potencia en el momento del arranque, VA, tensión de red, V.
Las bobinas de solenoide de freno de corriente continua pueden conectarse en serie y en paralelo (excitación).
 Los electroimanes de la bobina de conexión en serie son de acción rápida debido a su baja inductancia y su funcionamiento es confiable, ya que brindan frenado, el mecanismo para las rocas en el circuito del inducido del motor eléctrico. Su desventaja es la posibilidad de un frenado falso con la posterior desinhibición a muy baja carga, por ejemplo, en ralentí. Por lo tanto, es recomendable usarlos para mecanismos de grúas con fluctuaciones relativamente pequeñas de la carga y por lo tanto de la magnitud de la corriente de armadura, por ejemplo, para mecanismos de movimiento de grúas.
Los electroimanes de la bobina de conexión en serie son de acción rápida debido a su baja inductancia y su funcionamiento es confiable, ya que brindan frenado, el mecanismo para las rocas en el circuito del inducido del motor eléctrico. Su desventaja es la posibilidad de un frenado falso con la posterior desinhibición a muy baja carga, por ejemplo, en ralentí. Por lo tanto, es recomendable usarlos para mecanismos de grúas con fluctuaciones relativamente pequeñas de la carga y por lo tanto de la magnitud de la corriente de armadura, por ejemplo, para mecanismos de movimiento de grúas.
Los valores actuales para los mecanismos de elevación son aproximadamente el 40% de la corriente nominal del motor eléctrico, y para los mecanismos de desplazamiento, aproximadamente el 60%.Por lo tanto, la magnitud de la fuerza de tracción o el par de los frenos de bobina se indica constantemente en los catálogos para dos valores de corriente de bobina: para 40 y 60% de la nominal (respectivamente para mecanismos de elevación y movimiento).
Si en el proceso de arranque del motor eléctrico, el valor mínimo de la corriente que fluye a través de la bobina del electroimán del freno es inferior al 40 o 60% del valor nominal, entonces es necesario reducir el par de frenado a los valores indicado para el valor actual del 40 o 60% del nominal (reduciendo la fuerza del resorte del freno o el peso del freno).
 Los electroimanes de freno de CC con bobinas de conexión en paralelo no tienen las desventajas anteriores. Sin embargo, debido a la importante inductancia de las bobinas, estos electroimanes son inerciales. Además, son menos fiables, ya que cuando se rompe el circuito de armadura del motor eléctrico, los devanados de estos electroimanes siguen circulando alrededor de la corriente, y el freno queda sin freno.
Los electroimanes de freno de CC con bobinas de conexión en paralelo no tienen las desventajas anteriores. Sin embargo, debido a la importante inductancia de las bobinas, estos electroimanes son inerciales. Además, son menos fiables, ya que cuando se rompe el circuito de armadura del motor eléctrico, los devanados de estos electroimanes siguen circulando alrededor de la corriente, y el freno queda sin freno.
El primer inconveniente se puede eliminar mediante forzado, para lo cual, en serie con la bobina, se incluye una resistencia económica, que durante la retracción de la armadura electromagnética, maniobra el relé de corriente con los contactos de apertura y entra al circuito eléctrico después de la armadura del electroimán. se retira, reduciendo la corriente en la bobina y su calentamiento en consecuencia.
La segunda desventaja se elimina conectando la bobina del relé de corriente en serie con la armadura del motor eléctrico y cerrándolo en serie con el circuito de bobina del electroimán. Cuando se utiliza el forzado, el tiempo de forzado no debe ser superior a 0,3 - 0,6 s.
Para alimentar electroimanes con corriente continua desde una red de corriente alterna, se utilizan rectificadores estándar de media onda con diodos para una corriente de hasta 3 A y un grupo de condensadores con una capacidad de 2 a 14 μF, que proporciona parámetros de salida que corresponden a las condiciones para los devanados de suministro de electroimanes.
Los electroimanes de frenado de corriente alterna se utilizan ampliamente para las instalaciones de grúas, pero la práctica de su trabajo ha demostrado que tienen una serie de desventajas: resistencia al desgaste relativamente baja, corrientes de conmutación de bobina significativas de 7 a 30 veces más altas que sus corrientes nominales (con armaduras completamente retraídas). ), fuertes golpes durante el frenado y liberación debido a la falta de regulación de la suavidad del proceso de frenado, daño a las bobinas debido al sobrecalentamiento con retracción incompleta de la armadura.
 Un inconveniente común de los electroimanes de freno de CC y CA es la imperfección de las características de tracción: al comienzo de la carrera del inducido, se desarrolla la fuerza de tracción más pequeña y al final, la más grande.
Un inconveniente común de los electroimanes de freno de CC y CA es la imperfección de las características de tracción: al comienzo de la carrera del inducido, se desarrolla la fuerza de tracción más pequeña y al final, la más grande.
Con todas estas desventajas, los electroimanes de freno de CC son más fiables en funcionamiento que los electroimanes de CA. Por lo tanto, para controlar los frenos de los mecanismos de grúa con equipos de alimentación de CA, a menudo se prueban electroimanes de freno de CC alimentados por rectificadores de semiconductores.
Teniendo en cuenta que los electroimanes de freno tienen una serie de desventajas significativas mencionadas anteriormente, actualmente se utilizan ampliamente para accionar frenos de grúa. propulsores electrohidráulicos de carrera larga.