Sensores sin contacto para la posición de mecanismos
 En este artículo hablaremos de sensores de posición de mecanismos. Básicamente, la función principal de cualquier sensor es dar una señal cuando ocurre un evento específico. Es decir, cuando ocurre un evento de disparo, el sensor se activa y genera una señal, que puede ser analógica o discreta, digital.
En este artículo hablaremos de sensores de posición de mecanismos. Básicamente, la función principal de cualquier sensor es dar una señal cuando ocurre un evento específico. Es decir, cuando ocurre un evento de disparo, el sensor se activa y genera una señal, que puede ser analógica o discreta, digital.
Los sensores de límite se han utilizado como sensores de posición durante muchas décadas. interruptores Consisten en contactos eléctricos que se abren o cierran mecánicamente cuando alguna variable (posición) alcanza un valor determinado. Los interruptores de límite de varios tipos son una parte importante de muchos sistemas de control, cuya confiabilidad depende de ellos. tales sensores contienen elementos mecánicos en movimiento cuyos recursos son limitados.
Actualmente, los interruptores de límite están siendo reemplazados activamente por varios sensores de proximidad. En la mayoría de los casos, sensores de proximidad de los siguientes tipos: inductivo, generador, magnetohercón y fotoelectrónica. Estos sensores no tienen contacto mecánico con el objeto en movimiento cuya posición se está monitoreando.
Los sensores de posición sin contacto aseguran una alta velocidad y alta frecuencia de encendido del mecanismo. Una cierta desventaja de estos sensores es la dependencia, su precisión, de los cambios en el voltaje y la temperatura del suministro. Dependiendo de los requisitos, el dispositivo de salida de estos dispositivos puede ser el siguiente elemento lógico sin contactoy relé eléctrico.
En esquemas de frenado de precisión de accionamientos eléctricos, los sensores de proximidad se pueden usar tanto para controlar un cambio descendente como una parada final.
Existen muchos tipos de sensores en el mercado hoy en día, pero en el marco de este artículo destacaremos el tema sensores de posición directamente inductivos, ya que en más del 80% de los casos son sensores inductivos los que sirven como sensores para la posición de los mecanismos.
El sensor inductivo se activa cuando el metal se acerca a su zona de activación. Por este motivo, los sensores de posición inductivos también se denominan sensores de presencia, sensores de proximidad o simplemente interruptores inductivos.
Consideremos ahora el principio de funcionamiento de un sensor inductivo. Como se mencionó anteriormente, cuando el metal está lo suficientemente cerca de la zona de activación, el sensor se activa. Este fenómeno consiste en la interacción de los involucrados inductores con metal acercándose a él, que cambia bruscamente la magnitud del campo magnético de la bobina, lo que conduce a la activación del sensor, se activa, la señal correspondiente aparece en su salida.
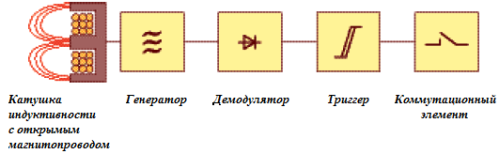
La parte electrónica del dispositivo contiene un circuito de control, que a su vez controla un interruptor de relé o transistor. Consta de las siguientes partes:
-
Un generador que crea un campo electromagnético necesario para interactuar con un objeto.
-
Gatillo Schmitt que proporciona histéresis de conmutación.
-
Un amplificador para aumentar la amplitud de la señal para que alcance el valor de actuación requerido.
-
Indicador LED que informa sobre el estado del interruptor. También proporciona supervisión y configuración del rendimiento.
-
Compuesto para proteger contra la penetración de partículas sólidas y agua.
-
Carcasa para el montaje del sensor y protección contra diversas influencias mecánicas, está fabricada en latón o poliamida y está acabada con tornillería.
Los sensores de posición inductivos son muy utilizados en sistemas de automatización industrial donde es necesario determinar periódicamente o constantemente la posición de cualquier parte del mecanismo. El sensor genera una señal que se envía al variador. Un arrancador, controlador, relé, convertidor de frecuencia, etc. puede actuar como mecanismo ejecutivo. Lo principal es que los parámetros del sensor corresponden a los parámetros del variador en términos de voltaje y corriente.
La mayoría de los sensores no son dispositivos de potencia, son principalmente dispositivos de señalización, por lo tanto, el sensor en sí, por regla general, no cambia nada potente, sino que solo controla, da una señal de control, actúa como un dispositivo de inicio de acción que ya se puede conectar. a la conmutación de potencia.
Los sensores de posición inductivos modernos se encuentran con mayor frecuencia en dos versiones de carcasas de plástico o metal: rectangulares o cilíndricas. El diámetro del sensor con sección transversal circular puede ser de 4 a 30 mm, pero los diámetros más utilizados son 18 y 12 mm.
Cuando el sensor está montado en el equipo, se establece un espacio entre la placa de metal y la zona de actuación del sensor, por lo general, esta distancia no supera el diámetro del sensor y, por regla general, resulta ser 2-3 veces más pequeño que su diámetro.
Según el método de conexión, los sensores de posición inductivos pueden ser de dos, tres, cuatro y cinco hilos.
Dos cables cambian directamente la carga, como bobina de arranque, es decir, funcionan como un interruptor convencional. Los sensores de dos hilos requieren resistencia de carga, por lo que no siempre son adecuados como una herramienta confiable, pero no pierden su relevancia.
La carga simplemente se conecta en serie con el sensor, si se usa un voltaje constante, entonces es importante observar la polaridad, si la polaridad alterna no es importante, lo principal es la potencia y la corriente conmutadas.
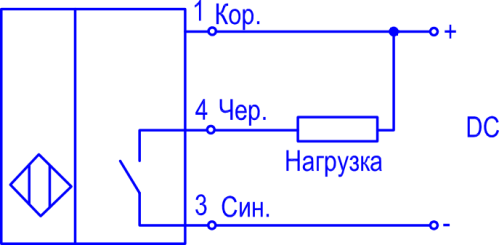
Los sensores de tres cables tienen un tercer cable para alimentar el propio sensor, y esta es la solución más popular. Los sensores de cuatro y cinco hilos tienen salidas de transistor o relé para conectar la carga, y el quinto cable le permite seleccionar el modo de funcionamiento del sensor, el estado inicial de las salidas.
Dado que las salidas pueden ser tanto de relé como de transistor, los sensores se dividen en tres tipos según el dispositivo de las salidas: relé, npn y pnp.
Sensores con salida de relé
Un sensor con salida de relé tiene aislamiento galvánico del circuito de alimentación del circuito incluido. Cambia un cable y el voltaje en el circuito conmutado no es particularmente crítico. Dado que el circuito de alimentación del sensor está aislado galvánicamente, esto puede considerarse una ventaja del sensor de relé. Los sensores de este tipo suelen ser grandes.
Sensores con salida de transistor pnp
El sensor tiene un transistor pnp en la salida que conmuta el cable positivo con la carga. Se conecta una carga al circuito colector del transistor pnp de salida, que está permanentemente conectado al negativo a través de su segundo conductor.
Sensores con salida de transistor npn
El sensor tiene un transistor NPN en la salida que conmuta el cable negativo con la carga. Se conecta una carga al circuito colector del transistor npn de salida, que está permanentemente conectado por su segundo cable al cable positivo.
Según el estado inicial de las salidas, los sensores de posición inductivos pueden ser contactos normalmente cerrados o normalmente abiertos. El estado inicial significa que este estado es en el momento en que el sensor aún no está disparado, es decir, no está activado.
Si los contactos de salida están normalmente cerrados, entonces la carga está conectada en tiempo de inactividad, si está normalmente abierta, hasta que se active el sensor, la carga se cortará y no se suministrará energía al variador (por ejemplo, contactor). Los contactos normalmente cerrados se designan en formato inglés: N.C. (normalmente cerrado), normalmente abierto — N.A. (Normalmente abierto).
Así, los sensores con salidas de transistor son de cuatro tipos: dos tipos según la conductividad (pnp o npn) y dos tipos según el estado inicial de las salidas. También puede haber un retraso al encender o apagar.

Según el tipo de variador que se conecte al sensor, así como el método de alimentación, la lógica del sensor puede ser positiva o negativa. Esto se debe al nivel de voltaje que activa la entrada del dispositivo.
Si la entrada se activa cuando el cable negativo del actuador está conectado a tierra, al menos, entonces la lógica se llama negativa, tal conexión es característica de los sensores con salidas de transistor de tipo npn.
La lógica positiva corresponde a conectar el cable positivo del variador a la fuente de alimentación positiva cuando está activado, esta lógica es típica de sensores con salidas de transistor pnp. Muy a menudo, existe una lógica positiva en el funcionamiento de los sensores inductivos para la posición de los mecanismos.
Tipos más antiguos de sensores de posición inductivos más utilizados
Sensores de posición inductivos IKV-22
Sensores inductivos IKV-22. El funcionamiento de estos sensores se basa en el principio de cambiar la resistencia inductiva de las bobinas con núcleo de acero cuando cambia el entrehierro en el circuito magnético.
Un circuito magnético con dos bobinas está montado sobre una placa de acero, cerrado con una cubierta de plástico. Dos condensadores MBGP (uno con una capacidad de 15 μF, 200 V, el otro con una capacidad de 10 μF, 400 V) están unidos a la placa desde la parte inferior. Los condensadores están cubiertos con una cubierta. El cable se conecta a través del sello. Se instala una derivación magnética en el mecanismo, cuyas dimensiones deben ser al menos: espesor 2 mm, ancho 80 mm, longitud 140 mm. El entrehierro entre el circuito magnético y el shunt es de 6 ± 4 mm.
El relé de salida generalmente se enciende y apaga en el momento en que la derivación magnética pasa a través del sensor, cuando debido a un cambio en la resistencia inductiva de la bobina, se produce una resonancia de corriente y cae la corriente a través de la bobina del relé. Estos relés: tipo MKU-48, 12 V CA, consumo de corriente no superior a 0,45 A, caída de corriente no inferior a 0,1 A.La tensión de alimentación del circuito del sensor es relé de 24 V CA.
Sensores de posición inductivos ID-5
En los talleres metalúrgicos se utilizan sensores inductivos del tipo ID-5, diseñados para trabajar a temperatura ambiente hasta +80°C y humedad hasta el 100%. El polvo conductivo y las incrustaciones son aceptables. Se utiliza un amplificador de salida de semiconductor de tipo UID-10 con el sensor. La potencia de salida del amplificador (25 W) es suficiente para encender los relés REV-800, contactores KP21, MK-1, etc.
El espacio de aire entre el sensor y el objeto ferromagnético observado puede ser de hasta 30 mm. Las dimensiones del sensor ID-5 son 187x170x70 mm, la tensión de alimentación es de 220 V ± 15 %, 50 Hz.
Interruptores sin contacto BSP de tamaño pequeño
Los pequeños interruptores de movimiento BSP-2 (con salida sin contacto, a elemento lógico) y BRP (con salida a relé PE-21, 24 V, 16 ohmios) se utilizan en máquinas para corte de metales.
El interruptor BSP-2 consta de un sensor de transformador diferencial y un disparador de semiconductor. El sistema magnético de la primera bobina sensora se mueve mediante una placa de acero, y la segunda bobina se manipula a medida que se mueve sobre su sistema magnético conectado al mecanismo de armadura plana. Las bobinas se encienden en la dirección opuesta.
Si la armadura está por encima del sensor, las reactancias inductivas de las bobinas son iguales y la salida del sensor del transformador diferencial es cero. En este caso, aparece un voltaje de al menos 2,5 V en la salida del disparador, que es suficiente para que funcione el elemento lógico.
En ausencia de una armadura sobre el sensor, se aplica un voltaje al gatillo, que lo devuelve a su estado original. Entonces la señal de salida del interruptor es cero.
El principio de funcionamiento del interruptor BRP es similar en muchos aspectos al del BSP-2: dentro de la caja se instala un sensor inductivo (según el circuito del transformador diferencial), un disparador y un amplificador. Las bobinas secundarias con un número diferente de vueltas se encienden en la dirección opuesta. A medida que la armadura se superpone al sistema magnético del sensor, la señal disminuye y, después de cambiar la fase, se cambia el gatillo y se activa un relé de salida externo (PE-21, 24 V, 16 ohmios).
El anclaje fijado al mecanismo tiene unas dimensiones de 80x15x3 mm. El espacio entre el ancla y el sensor es de 4 mm. La precisión de los interruptores en el modo nominal es de ± 0,5 mm, el diferencial de actuación no supera los 5 mm. En. fluctuaciones en el voltaje y la temperatura del suministro, el error de los interruptores BSP-2 y BRP puede alcanzar ± (2.5-f-3.0) mm.
Sensores inductivos de alta frecuencia VKB
Los sensores inductivos de alta precisión del tipo VKB con armadura plana o en forma de U también se utilizan para la automatización de máquinas de corte de metales. Los polos del transformador incorporado forman un sistema electromagnético abierto. El espacio de aire de trabajo es de 0,1-0,15 mm.
El voltaje de salida del devanado secundario del transformador se alimenta a un circuito de medición diferencial y luego a un amplificador de transistor. El error total del sensor con fluctuaciones de temperatura de 5 a 40 ° C y voltaje de 85 a 110% del valor nominal es de ± (0.064-0.15) mm, la diferencia de respuesta no supera los 0.4 mm. La velocidad máxima de movimiento del mecanismo es de 10 m/mm. Dimensiones del sensor 62x34x24 mm. Tensión de alimentación 12 V.
Los tipos especiales de sensores inductivos de precisión para máquinas de corte de metales con circuito diferencial tienen un error de menos de ± 0,01 mm.Dichos sensores incluyen un interruptor de movimiento sin contacto del tipo VPB12, que consta de una unidad de sensor en una unidad electrónica. La unidad de sensor incluye un sensor de trabajo inductivo, un sensor de compensación inductivo y placas de circuito impreso. El mecanismo está montado: elemento de ferrita de control. Tensión de alimentación 12 V CC. La distancia máxima de exposición no es superior a 0,12 mm. Se puede conectar un relé tipo RPU-0 a la salida del sensor. La corriente de carga máxima del dispositivo de salida es de 0,16 A.
Sensores de posición del generador
Los sensores de este tipo son compactos y muy precisos. Los generadores de sensores de las series KVD-6M y KVD-25 (con ranuras), KVP-8 y KVP-16 (aeronave) han demostrado su eficacia. Son adecuados para su uso en altas concentraciones de humedad y polvo. Los elementos del circuito de transistores del sensor (generador y disparador) están ubicados en una carcasa de poliestireno resistente a los golpes. El sellado se realiza con un compuesto de endurecimiento en frío. El rango de temperatura de funcionamiento es de - 30 a +50 ° C.
El sensor HPC genera una señal discreta cuando una placa de metal («bandera») pasa a través de la ranura, provocando una interrupción en la generación y conmutación del gatillo. El ancho de la ranura es de 6 mm para el sensor KVD-6M y de 25 mm para el sensor KVD-25.
Los sensores KVP-8 y KVP-16 se activan cuando una placa metálica pasa por ellos a una distancia máxima de 8 y 16 mm, respectivamente.